
La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999
| . |
|
|
|
La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999 |
| . |
|
Home page I Meccanica della locomozione e trazione elettrica |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Note di trazione elettrica. Comando e regolazione della velocità |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
IL
COMANDO MULTIPLO
A CONTATTORI INDIPENDENTI |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
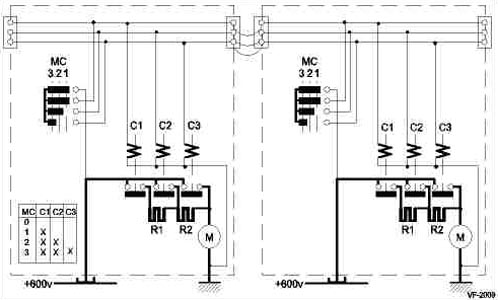
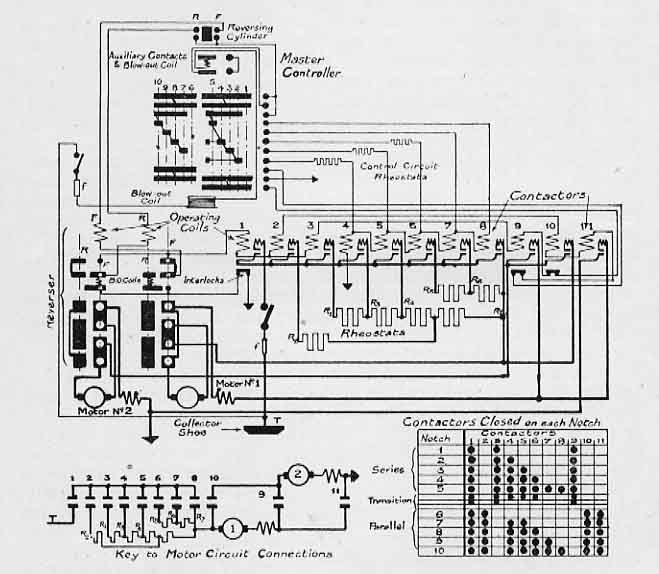
Comando indiretto a contattori individuali Il sistema di comando multiplo Sprague del 1882, benché utilizzato in varie installazioni fino ai primi anni del secolo XX, presenta vari inconvenienti, riconducibili tuttI più o meno all'utilizzazione dA UN pesante combinatore di tipo tramviario, azionato da un servomotore elettrico. Dopo l'acquisizione dei brevetti dei relativi brevetti da parte della Thomson-Houston il problema del comando multiplo si affronta partendo dalla necessità di rendere il sistema più agile, in particolare di poter elevare la velocità di esclusione del reostato nelle varie motrici comandate; ciò si ottiene in primo luogo con la sostituzione del combinatore tramviario con una serie di teleruttori (contattori) comandati dai controller di manovra, secondo il principio indicato nello schema sottostante: C1, C2, C3 sono i contattori che escludono il reostato R1, R2, MC è il controller di manovra, M è il motore di trazione ed il comando di tutto il treno si ha attraverso il cavo di comando collegato dagli accoppiatori di estremità. I circuiti di trazione a corrente elevata restano confinati entro le singole motrici e tutto il circuito di comando è percorso da una corrente relativamente debole a causa della quale i controller di manovra si semplificano notevolmente e non si hanno particolari problemi nell'accoppiamento tra i rotabili. Si nota che il sistema rinuncia, almeno al momento, all'automatismo insito nel sistema Sprague (controllo amperometrico dell'avviamento) e la condotta del treno torna ad essere completamente regolata dal conducente, il lavoro del quale è però molto semplificato dalla leggerezza dei controller.
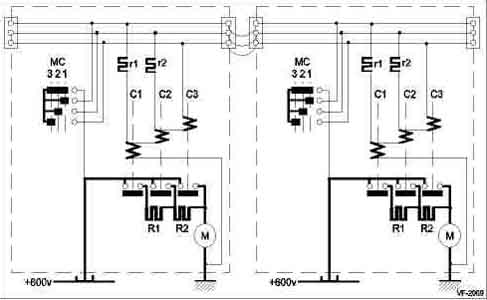
Alimentazione in serie dei contattori Una prima applicazione di questo sistema, detto subito Sprague-Thomson Houston, si ebbe in Francia, su alcune elettromotrici della linea di Orléans; nonostante, come usualmente avviene, la nuova installazione fosse stata salutata come un grande successo, si manifestò subito un primo inconveniente: le bobine dei contattori, previste per essere alimentate alla tensione di linea di circa 600 V, si interrompevano con preoccupante frequenza. In effetti, un semplicissimo calcolo mostra come sia difficile realizzare un contattore che, in dimensioni accettabili, possa simultaneamente essere alimentato ad una tensione sui 600 V ed essere in grado di interrompere una corrente di un centinaio di ampère almeno. Fissando ad es. in 100 W la potenza che può essere dissipata nella bobina con un riscaldamento accettabile, alla tensione di 600 V si deduce per la stessa una resistenza di 6002/100=3600 ohm, per ottenere il quale valore il filo di avvolgimento dovrà essere così sottile da essere soggetto a facile interruzione per ossidazione, effetti elettrolitici e simili. A questo punto, alla Thomson-Houston ci si convinse che un contattore, per essere sicuro, non dovesse essere alimentato ad una tensione superiore ad un centinaio di volt o poco più ed in effetti, sempre per una dissipazione di 100 W, a 100 V la resistenza della bobina sarebbe diventata 1002/100=100 ohm, valore accettabile per un avvolgimento con filo sufficientemente grosso; nasceva però il problema di come alimentare a 500 o 600 V un contattore previsto per 100 V, escludendo naturalmente l'uso di una resistenza di caduta con la quale si sarebbe avuta una eccessiva dissipazione di energia. Alle stesse conclusioni si giunge anche considerando la corrente totale richiesta dal circuito di comando che, per dover essere portata da un rotabile all'altro attraverso gli accoppiatori di testa, non deve superare il limite di qualche ampére. La questione fu risolta, con qualche complicazione, prevedendo l'alimentazione in serie dei vari contattori, anzichè in parallelo, secondo il principio indicato nello schema che segue.
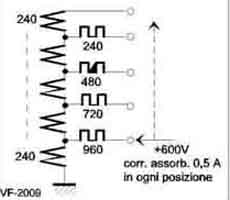
Da un controller esterno, in pos. 1 si dà alimentazione al primo contattore in serie ad una resistenza; in pos. 2 l'alimentazione si sposta sul secondo contattore in serie al primo e ad un'altra resistenza e così via; nell'ultima posizione l'alimentazione è data ai cinque contattori in serie tra loro senza alcuna resistenza interposta. Supponendo pari a 250 ohm la resistenza di ogni bobina (valore comunemente adottato) e facendo r1=960 ohm, r2=720 ohm, r3=480 ohm, r4=240 ohm in ogni combinazione la tensione su ogni bobina è 600/5=120 V con una dissipazione di 1202/240=60 W e la corrente assorbita è di 600/1200=0,5 A. Lo schema sotto riportato equivale a quello di fig. 1, ma adotta l'alimentazione in serie dei contattori.
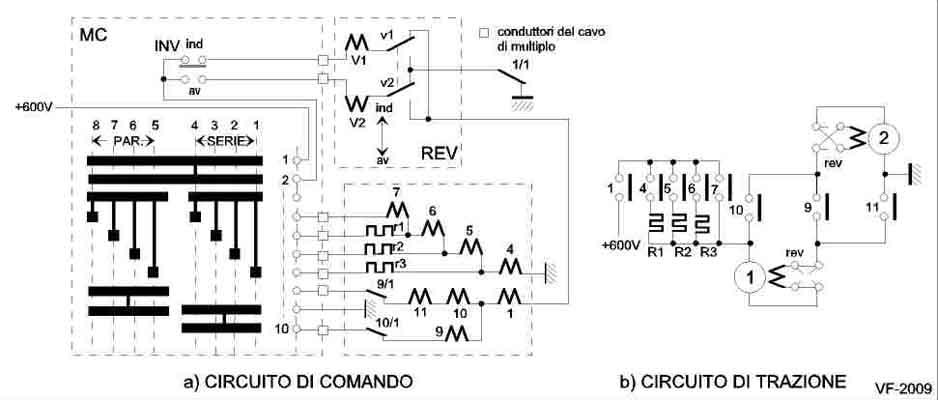
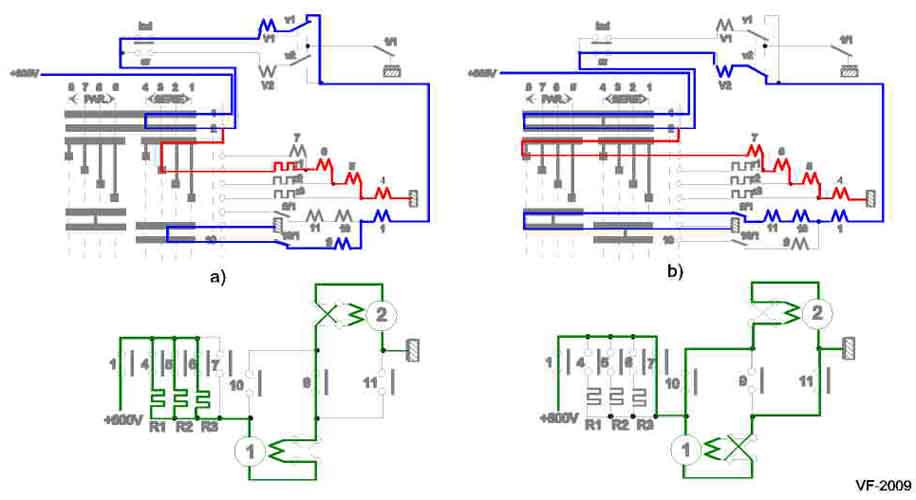
Un esempio di comando elettromagnetico I disegni sottostanti riportano, in forma semplificata per una maggiore comprensione, gli schemi dei circuiti di comando e di trazione di uno dei primi equipaggiamenti a contattori elettromagnetici di costruzione Thomson-Houston, applicato nel 1904 in Inghilterra sulla tratta Newcastle-Tynemouth della North Eastern Ry. e sulle linee metropolitane della Central London Ry. In fig. 3 sono dati gli schemi dei circuiti risp. di comando (controller, invertitore, bobine dell'invertitore e dei contattori) e di trazione (contatti dei contattori, reostato, motori); in fig. 4 sono tracciate le connessioni che si realizzano per due posizioni del controller di comando (tacca 3 in serie e fine parallelo).
Circuito di trazione (fig. 3 b). Comprende l'invertitore REV ed un totale di 8 contattori, con le seguenti funzioni:
Come si realizzino le combinazioni tra l'invertitore, il reostato ed i motori in serie e in parallelo è chiarito dai due esempi di fig. 4 a,b. L'invertitore predispone i motori nel senso di marcia voluto. Il contattore 1 ha la funzione di interruttore principale e, dovendo aprire e chiudere il circuito in presenza di corrente di notevole intensità (ad es. quando il conducente riporta il controller a zero durante l'accelerazione in una salita; qualcuno forse si ricorda della specie di esplosione che si sentiva in questi casi sotto la cassa di alcune motrici dei tram dei Castelli) sarà dotato di dispositivi spegni-arco; molte volte opportuni circuiti di blocco garantiscono che l'interruttore principale chiuda per ultimo rispetto ai contattori ed apra per primo, evitando fin che si può di dover dotare di spegni-arco anche gli altri contattori. Il contattore 9 collega i due motori in serie tra loro (fig. 4 a); i contattori 10 ed 11 li collegano in parallelo (fig. 4 b). Il contattore 4 completa il circuito di trazione inserendo la resistenza r1 del reostato; il 5, restando 4 eccitato, pone r2 in parallelo ad r1, riducendo la resistenza totale del reostato; il 6 inserisce in modo analogo r3; il 7 esclude, cortocircuitandolo, tutto il reostato. Circuito di comando (fig. 3 a). Inizia dal controller di manovra MC e interessa le bobine di comando dell'invertitore di marcia e dei vari contattori. Circuito dell'invertitore di marcia. La parte più complicata dell'intero circuito è l'invertitore di marcia REV, senza posizione neutra; ha due posizioni, marcia avanti (AV) e marcia indietro (IND) ed è comandato dalle due bobine V1 e V2 rappresentate a sinistra, alimentate dal commutatore (invertitore) INV posto sul controller di comando. Sua caratteristica è di restare indefinitamente nella posizione sulla quale è stato comandato, anche dopo la cessazione dell'azione della relativa bobina, fintanto che non arrivi un ulteriore comando di inversione di marcia; è dotato di un complessivo di contatti ausiliari v1 e v2 che opera come segue. Nella posizione di cui nello schema, l'invertitore è stato posto a marcia indietro da INV; qualora il conducente, senza voler invertire la marcia, porti il controller di manovra nella pos. 1, si chiude il seguente circuito: (1) +600V, MC banco 1-2, contatto ind di INV, REV bobina V1, contatto v1(ind), bobine contattori 1 e 9, MC banco 10-9, terra. La bobina di marcia indietro V1 eccita, ma essendo INV già predisposto a marcia indietro, non esercita nessuna ulteriore azione; i contattori 1 e 9 chiudono invece il circuito di trazione (vedi oltre). Se invece il conducente vuol passare a marcia avanti, aziona dapprima l'invertitore INV e sposta poi MC in pos. 1; il circuito che si chiude è ora: (2) +600V, MC banco 1-2, contatto av di INV, REV bobina V2, contatto v2(ind), contatto ausiliario sul contattore 1, terra. La bobina V2 eccita spostando l'invertitore REV in posizione di marcia avanti; così facendo si apre il contatto v2(ind) e si chiude v2(av), il circuito attraverso il contatto ausiliario 1/1 è abbandonato ed è stabilito quello verso le bobine di 1 e 9: (3) +600V, MC banco 1-2, contatto av di INV, REV bobina V2, contatto v2(av), bobine contattori 1 e 9, MC banco 10-9, terra. In questo modo, tutti i successivi avviamenti a marcia avanti lasceranno immutato il circuito (3); solo passando a marcia indietro, al primo avviamento si realizzerà il circuito (1) con azionamento dell'invertitore. Si noti la funzione, nel circuito (2), del contatto di apertura 1/1: essendo il contattore 1 sempre eccitato in trazione (ved. oltre), si impedisce ogni azionamento dell'invertitore durante la marcia in trazione. Avviamento reostatico con i motori in serie. Al termine della fase precedente risultano eccitati i contattori 1, 9 e 4; quest'ultimo è stato alimentato da MC banco 3-7 e resistenza r3. Il circuito di trazione è chiuso sulla parte R1 del reostato (fig. 4 b), mentre il contatto di 9 collega in serie i due motori. Portando MC nelle posizioni successive 2, 3, 4 eccitano dai banchi 3-6, 3-5, 3-4 successivamente i contattori 5, 6, 7 portando alla marcia in serie con reostato escluso. Transizione e marcia in parallelo. Portando MC in pos. 5 si ha l'interruzione dei banchi 3-7-6-5-4 e la caduta dei contattori 4, 5, 6, 7; il circuito di trazione si apre. Simultaneamente si apre il banco 10-9 e si chiude quello 8-9; cade il contattore 9 e al suo posto eccitano 10 e 11, che collegano i motori in parallelo; eccita di nuovo 4 dal banco 3-7 e si richiude il circuito di trazione, mentre nelle pos. 6, 7, 8 di MC si avrà ancora l'esclusione del reostato come prima indicato, fino ad arrivare alla marcia in parallelo con il reostato escluso, pos. 8 di MC.
Osservazioni.
Prime applicazioni del sistema elettromagnetico
Sprague-Thomson Houston
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
TramRoma, ©1999-2023 - Curatori: Dario Giacomini, Mauro Di Pietrantonio |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ultimo aggiornamento: mercoledì 06 dicembre 2023 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
{kind=link}