La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999
| . |
|
|
|
La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999 |
| . |
| . | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Tecnica dei rotabili della rete filoviaria di Roma |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
EQUIPAGGIAMENTO BREDA CON FRENATURA A RECUPERO |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
L'ATAG ha in servizio, a partire dal 1937, due gruppi di filobus a due assi di costruzione Breda per parte meccanica, carrozzeria ed equipaggiamento elettrico, il 4001-4015 ed il 4173-4199 in esercizio rispettivamente dal marzo 1937 e dal dicembre 1938; i due gruppi sono estremamente simili tra loro, anzi identici come meccanica e carrozzeria e con minime differenze nell'equipaggiamento elettrico. Filobus gr. 4001-4015 Costituiscono la prima serie del gruppo di prototipi ordinati dall'ATAG nel 1936, prima solo nell'ordine della numerazione di esercizio, perchè è invece la quarta e l'ultima dei prototipi ad entrare in servizio nel marzo 1937; utilizza motori ad eccitazione compound (il motore compound o ad eccitazione composta è dotato di due avvolgimenti statorici indipendenti, disposti l'uno in serie con l'indotto e l'altro, campo derivato, in parallelo allo stesso) ed un originale tipo di avviatore di costruzione Breda, che prevede l'avviamento automatico con l'usuale combinazione serie-parallelo dei motori, cinque gradi di riduzione di eccitazione dei motori in parallelo, frenatura elettrica a recupero e reostatica. La frenatura a recupero si ottiene a mezzo dello stesso pedale acceleratore, nella corsa di ritorno verso lo zero, nella quale posizione entra automaticamente in azione la frenatura reostatica fin quasi all'arresto del rotabile; il freno pneumatico è comandato nel modo usuale dall'altro pedale. Il sistema non permette quindi la marcia in coasting della vettura (ossia per inerzia o in folle, non in trazione nè in frenatura). Durante la frenatura elettrica a recupero il circuito di trazione è attraversato dalla corrente generata dai motori di trazione e rinviata in linea; in frenatura reostatica i campi derivati dei motori sono alimentati dalla linea. In entrambi i casi, il rotabile in frenatura non potrebbe passare correttamente sotto le slitte di comando degli scambi elettrici presenti sulla rete (si avrebbe sempre l'azionamento dello scambio); l'interruzione della frenatura a recupero per apertura del circuito di trazione può anche dar luogo a pericolose sovratensioni sui motori ed è quindi previsto un apposito relè tarato (relè di sovratensione) che in tal caso apre detto circuito. I filobus prevedono quindi, oltre ai due usuali pedali di acceleratore e freno, un apposito pedalino posto alla sinistra della colonna del volante, azionando il quale il circuito di trazione è momentaneamente aperto (ma questa necessità di aprire il circuito di trazione nel passaggio sotto le slitte di comando degli scambi costituisce, per il personale di condotta, uno dei lati negativi di queste vetture). Si hanno sostanzialmente due tipi di frenatura a recupero:
In trazione a corrente continua con equipaggiamenti tradizionali di tipo reostatico la complicazione dei circuiti necessari al recupero, specie al pieno recupero, ha il più delle volte vanificato i vantaggi che si sperava poter ottenere dal sistema, vantaggi che nella maggior parte dei casi si sono rivelati in pratica di gran lunga inferiori, quanto all'entità di energia recuperata, di quanto si poteva prevedere in via teorica. Ciò anche per la necessità, da parte del sistema di alimentazione, di poter utilizzare direttamente l'energia fornita dai rotabili in recupero, condizione non sempre realizzabile. Equipaggiamento elettrico L'equipaggiamento elettrico dei filobus Breda gr. 4001-4015 consta dei seguenti elementi:
La condotta del filobus si effettua con gli usuali pedali di accelerazione e freno. Il pedale di accelerazione ha le seguenti posizioni:
Il passaggio da 3 in 4 non provoca alcuna variazione nella marcia della vettura; viceversa se, durante la progressiva riduzione dell'eccitazione in parallelo (pos. 5), il conducente riporta il pedale in 4, la progressione di riduzione eccitazione momentaneamente si arresta. La frenatura a recupero si ha ogni qualvolta il conducente riporti a ritroso il pedale di accelerazione dalla pos. 5 alla 3 o dalla 3 alla 2; nel primo caso il recupero cessa al raggiungimento della velocità corrispondente alla pos. 3 e nel secondo caso a quella corrispondente alla pos. 2 (circa 15 km/h). La frenatura reostatica si ha sempre quando il pedale acceleratore è riportato in pos. 0; il circuito di trazione con i motori in parallelo e campo derivato parzialmente ridotto è chiuso sul reostato di avviamento, che viene progressivamente escluso. Impianto a bassa tensione a 24 V; motogeneratore di carica batteria da 500 W. Possibilità di marcia di emergenza a batterie (48 V). Funzioni strumenti e comandi Circuito di comando Non si dispone dello schema del circuito di comando, che certamente è molto simile a quello del gr. 4173-4199. Successive modifiche Il sistema usato sul gruppo 4001-4015 certamente mal si adattava all'utilizzo dei veicoli nelle strade del centro di Roma (si pensi solo alla complicazione della guida nel percorrere strade in pendenza come v. F. Crispi o v. Capo le Case o nel passare sotto zone particolarmente dense di scambi ed incroci, come tra p. dei Cinquecento e p. Indipendenza). Il caso volle che l'ultima vettura del gruppo, la 4015, avesse un grave incidente con un automezzo militare il 13 settembre 1939 (ved. immagini più sotto). Durante la riparazione del rotabile, che comportò la completa ricostruzione della cabina di guida e dell'equipaggiamento di comando che in queste vetture era montato in parte sotto il sedile del conducente, l'ATAG, probabilmente in accordo con la Breda, montò sul filobus un altro avviatore Breda anch'esso abbastanza singolare, perchè a comando non automatico e con preselezione del collegamento dei motori, ossia tale che il conducente doveva stabilire a priori mediante un commutatore se utilizzare la connessione in serie o quella in parallelo per i motori (un simile sistema fu all'origine sperimentato anche sui filobus a tre assi Alfa Romeo-TIBB).
Non è noto se la modifica sia stata estesa ad altri rotabili del gruppo, ma può darsi che sia stata eseguita sulle vetture 4011 e 4013 che risultano radiate nel 1951. I cinque filobus 4001-4009 furono ceduti dall'ATAG alla SAER di Perugia nell'ottobre del 1943, ma caddero in mano dei tedeschi non è noto se a Perugia o durante il trasporto; sarebbe interessante sapere come si siano comportati i successivi proprietari di queste vetture (perugini o tedeschi che fossero) con l'avviatore Breda senza coasting. Questo gruppo è direttamente derivato dal precedente 4001-4015 e sembra differenziarsene solo per la soppressione della frenatura reostatica nella posizione 0 del pedale di accelerazione; con ciò il filobus può utilizzare la marcia in coasting nel modo usuale, mentre il comando della frenatura reostatica risulta spostato alla prima parte della corsa del pedale del freno pneumatico. Equipaggiamento elettrico Motore di trazione ed equipaggiamento di comando sono gli stessi del gr. 4001-4015, salvo la variazione riguardante la pos. 0 del pedale acceleratore prima accennata. La condotta del filobus si effettua con gli usuali pedali di accelerazione e freno. Il pedale di accelerazione ha le seguenti posizioni:
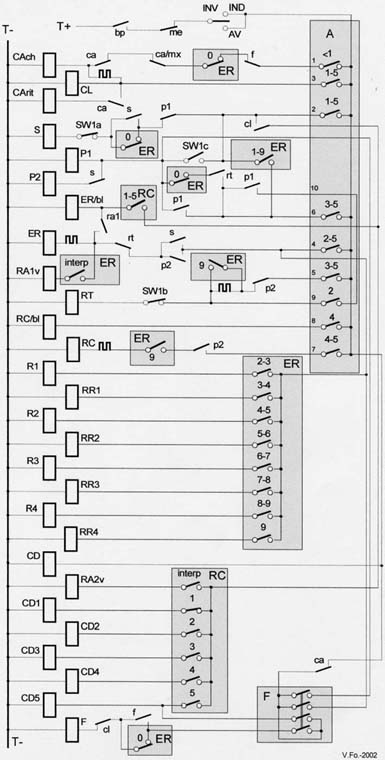
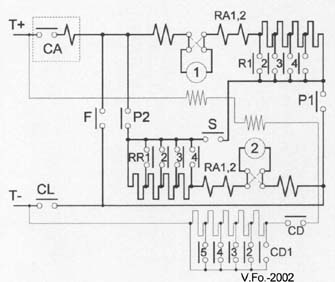
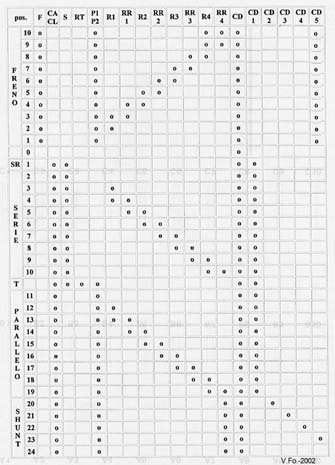
Resta valido quanto detto per il gr. 4001-4015 circa il comando del freno a recupero e la funzione del pedalino di apertura del circuito di trazione. Circuito di comando La parte sinistra della figura sottostante è lo schema semplificato del circuito di comando, con la indicazione dei soli elementi necessari a seguirne il funzionamento; la parte centrale è lo schema del circuito di trazione; la parte destra dà la successione di azionamento dei contattori.
Il circuito di comando consta dei seguenti elementi (v. schema).
Altri elementi del circuito di comando, quali contattori di blocco porte (bp), di marcia su batterie (me) sono solo accennati o sono del tutto omessi dallo schema. Per la lettura dello schema valgono le usuali convenzioni. I contatti indicati con lettere minuscole sono azionati dai teleruttori, le bobine dei quali portano la stessa lettera in maiuscolo. I contatti indicati con un simbolo di interruttore compresi nei riquadri A, ER, RC, F appartengono risp. al combinatore di avviamento, all'esclusore del reostato, all'inseritore delle resistenze di shunt e al combinatore di frenatura; per A, ER, RC i numeri posti sopra ogni contatto indicano in quali, delle posizioni del combinatore, ogni contatto è azionato; per ER ed RC il contatto interp si chiude nell'intervallo tra una posizione e la successiva (contatto di interposizione); apertura indica un contatto normalmente chiuso, chiusura un contatto normalmente aperto, scambio l'unione di un'apertura e di una chiusura. I riferimenti T+ e T- sono l’alimentazione di linea (trolleys positivo e negativo). I numeri dei circuiti si riferiscono ai numeri posti alle uscite dal combinatore A. Si presuppone qui di seguito che, prima di azionare il pedale acceleratore, il conducente abbia posto l'invertitore in marcia avanti (o indietro), abbia chiuso le porte e abbia posto il commutatore per marcia di emergenza in pos. normale. In tal modo il circuito di comando è alimentato dalla tensione di linea. Il commutatore di esclusione marcia in serie è in pos. normale.
* I numeri dati ai circuiti corrispondono ai numeri indicati a sinistra nel riquadro A dello schema elettrico del circuito di comando. Successive modifiche Nel giugno 1940 la vettura 4185 fu modificata connettendone i motori stabilmente in parallelo e fu dotata di un avviatore semplificato che permetteva l'avviamento con tutto il reostato incluso (pos. 1 del pedale acceleratore), l'esclusione automatica del reostato (pos. 2) e la riduzione di eccitazione del campo a cinque gradini (pos. 3-7); in quest'ultima fase il comando era semiautomatico, nel senso che il conducente, oltre a portare direttamente il pedale in pos. 7 ottenendo la progressiva riduzione di eccitazione, aveva anche la possibilità di arrestarsi su ognuno dei cinque punti. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
TramRoma, ©1999-2023 - Curatori: Dario Giacomini, Mauro Di Pietrantonio |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ultimo aggiornamento: sabato 13 gennaio 2024 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||