La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999
| . |
|
|
|
La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999 |
| . |
|
Home page I Meccanica della locomozione e trazione elettrica |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Note di trazione elettrica. Comando e regolazione della velocità |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
RIMORCHI PILOTA E DOPPIA TRAZIONE CON
MOTRICI A COMANDO DIRETTO |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Verso i primi anni Venti le grandi reti tramviarie delle capitali dell'Europa continentale, Parigi, Berlino, Budapest, Vienna, si trovarono a dover affrontare il problema della gran quantità di capolinea tronchi che, costruiti tra il 1880 e il 1910, seguitavano a limitarne notevolmente la capacità di traffico, sia per l'impossibilità di utilizzare in molti casi convogli con rimorchiate, sia per il rallentamento dato dalla manovra di inversione di posizione della motrice rispetto ai rimorchi, il così detto salto della motrice, ad ogni capolinea utilizzabile da treni di motrice e rimorchi. Due erano le vie per risolvere il problema: la costruzione di anelli ai capolinea e la realizzazione di unità reversibili, ossia tali da avere il posto condotta ad entrambe le estremità del treno, composto da un numero qualsiasi, almeno due, di rotabili. Mentre alcune reti, come ad es. Vienna, scelsero la prima via, altre, in primo luogo Parigi e Budapest, svilupparono per diverse vie il treno reversibile. Il problema di poter avere il posto di condotta in più punti di un treno sarebbe stato successivamente risolto con relativa facilità adottando il comando multiplo, già in uso sulle ferrovie metropolitane fin dal primo decennio del secolo; ma negli anni Venti il parco tramviario europeo era composto quasi esclusivamente da motrici a due assi a due motori inadatte a subire trasformazioni nel circuito di comando e per questi rotabili la soluzione del treno tramviario reversibile richiese un bel po' di ingegno. Due erano le vie da seguire per questa realizzazione:
Con uno o l'altro di questi sistemi si sarebbero realizzati treni di due rotabili dotati di cabine di guida alle due estremità, quindi bidirezionali come lo erano le motrici isolate; una maggiore capacità di trasporto si sarebbe poi potuta ottenere aggiungendo una ulteriore rimorchiata tra motrice e rimorchio pilota o tra le due motrici, anche se la cosa, come vedremo, non sarà molto consigliabile.
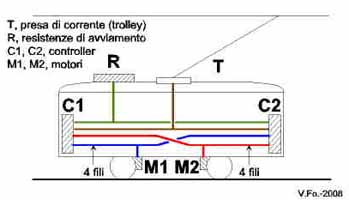
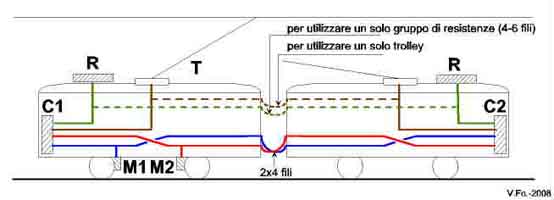
Il disegno schematizza l'impianto di trazione di una ordinaria motrice bidirezionale a due assi, dotata di due motori in serie e di avviamento serie-parallelo reostatico, utilizzata quasi esclusivamente nelle reti tramviarie europee a partire dal primo decennio del secolo XX. L'esigenza fondamentale da soddisfare nella realizzazione di un treno bidirezionale di due o più rotabili con un comando diretto della motrice è stata sempre quella di ridurre al minimo il numero dei fili necessari tra i diversi rotabili, fili chiamati a portare tutta la corrente del circuito di trazione e la stessa può raggiungere valori elevati in caso di notevoli potenze installate; i fili dovranno quindi essere di grossa sezione e, se in numero eccessivo, daranno luogo ad evidenti difficoltà negli accoppiamenti specie nel caso che i treni non abbiano una composizione bloccata. A titolo di esempio, per una motrice come le otto finestrini di Roma dotata di due motori da 40 kW l'uno alimentati a 550 V, la corrente massima nel circuito di trazione sarà di 2x40000/550=145 A, valore di tutto rispetto che adottando una densità di corrente di 3 A/mmq darebbe per i conduttori una sezione di 48 mmq. Lo schema sottostante mostra la disposizione per realizzare una coppia motrice-rimorchiata pilota; la rimorchiata sarà trainata in un senso di marcia e spinta nell'altro.
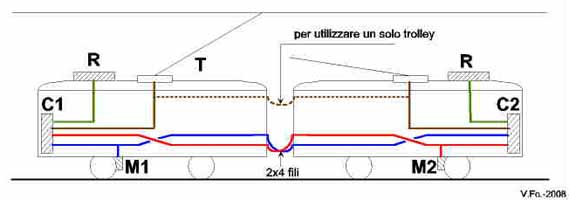
Il concetto base è il semplice trasporto di un controller della motrice all'altra estremità della rimorchiata. Il numero minimo di fili richiesto è pari ad 8, 4 per ogni motore necessari all'invertitore, se la rimorchiata pilota è dotata di proprio trolley e proprie resistenze di avviamento. Volendo utilizzare sempre il trolley della motrice (disposizione scomoda per i conducenti nell'azionamento degli scambi elettrici, trovandosi la presa di corrente a diversa distanza dalla testata del treno a seconda che lo stesso sia condotto dalla motrice o dalla rimorchiata) occorre un altro filo per portare l'alimentazione al controller della rimorchiata; se poi si volessero utilizzare sempre le resistenze di avviamento della motrice, si dovrebbe aggiungere un numero di fili variabile da 4 ad 8, a seconda del numero di tacche di avviamento reostatico. Nell'esempio di cui sopra sia la motrice che il rimorchio pilota solo monodirezionali (semipilota); ma nulla vieta di lasciare installato nella motrice il controller lato accoppiamento, così che la stessa possa essere impiegata nel modo usuale come motrice isolata o accoppiata ad una normale rimorchiata; così pure il rimorchio pilota potrebbe essere dotato di un secondo controller, rendendolo completamente bidirezionale. La prima disposizione è stata spesso usata per avere maggiore elasticità di esercizio, mentre la seconda ha trovato solo raro impiego. In linea di principio, il sistema è adottabile anche per treni composti di più di due rotabili; ma il passaggio dei cavi di trazione nelle rimorchiate intermedie ha sempre sconsigliato questa applicazione. Impiego di unità motrici a motore singolo In questa disposizione i due motori in una coppia di rotabili, in luogo di essere entrambi posti su una vettura, sono montati uno per ogni vettura; si tratta quindi di accoppiamento di due motrici a motore unico, ognuna semipilota. Si vede subito che il sistema è una variante della coppia motrice-rimorchio pilota, come risulta dallo schema sottostante (è come se si tagliasse in due una ordinaria motrice a due motori, trasformando poi i due monconi in motrici ad un motore).
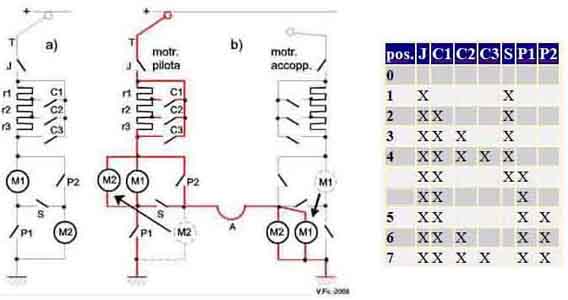
Questa disposizione è stata usata su larga scala solo sulla rete di Budapest e sulle reti di città di provincia in Ungheria; preferendola all'adozione di rimorchi pilota, forse per evitare di avere uno dei rotabili spinto anzichè trainato (i rotabili spinti erano spesso guardati con diffidenza). Valgono per questo caso le stesse osservazioni fatte per le coppie motrice-rimorchio pilota circa le prese di corrente e le resistenze di avviamento. E' da notare che il rapporto potenza/peso è lo stesso di un treno di motrice e rimorchio; da ciò segue che, con potenza sufficiente della motrice, si potrebbe aggiungere un ordinario rimorchio all'unità, inserendolo tra le due motrici; ma anche qui il passaggio dei cavi di trazione sconsiglia l'applicazione. Accoppiamento di due motrici a due motori Si realizzerebbe in questo modo una unità doppia bidirezionale a completa aderenza e di potenza doppia di quella di una ordinaria motrice. In realtà il sistema è stato raramente usato, almeno in trazione tramviaria, a causa del fatto che i normali controller delle motrici a comando diretto mal si prestano a portare la corrente assorbita da quattro motori in luogo di due; anche per i cavi di accoppiamento si potrebbe avere qualche problema. Oltre a ciò, se le due motrici debbono poter essere utilizzate anche singolarmente, si hanno complicazioni nella commutazione delle resistenze di avviamento che in doppia trazione dovrebbero avere un valore all'incirca pari alla metà di quello necessario in trazione singola. Salvo qualche caso, l'accoppiamento di due motrici a due motori è stato utilizzato più su reti metropolitane o ferroviarie che su reti tramviarie, in generale per aumentare la potenza installata sui treni. Sistema Schuckert a conduttore unico Il problema di moltiplicare le unità motrici di un treno mantenendone la condotta dal solo posto di testa si fece sentire, fin dai primi anni del secolo XX, per le reti metropolitane che avevano rapidamente raggiunto notevoli intensità di traffico e per le quali le manovre di inversione della motrice ai capolinea erano difficilmente utilizzabili. Il sistema che al momento appariva di più immediata applicazione era quello di costruire treni con numero variabile di rimorchiate comprese tra due motrici, sempre con il comando dal posto di condotta della motrice di testa; ciò era però difficilmente realizzabile con i sistemi a comando diretto per il notevole numero di fili di grossa sezione che avrebbero dovuto attraversare tutte le rimorchiate, con le soggezioni insite in condutture percorse da corrente di elevata intensità necessitanti di accoppiatori e cavi di giunzione. La Siemens Schuckertwerke propose un sistema nel quale si riusciva ad impiegare un unico conduttore, sia pure di grossa sezione, per alimentare la motrice di coda da quella di testa; un solo filo, per quanto grosso, non poneva gravi problemi nell'attraversamento di tutto il treno. Il principio del sistema è molto semplice, anche se, come spesso avviene, la sua pratica applicazione dava luogo a qualche difficoltà: mentre in trazione singola i due motori di una motrice seguitavano ad essere accoppiati con l'usuale sistema serie-parallelo, in doppia trazione i due motori di ogni motrice erano stabilmente collegati in parallelo fra loro e l'accoppiamento serie parallelo si eseguiva tra le due motrici. Il sistema è stato applicato su vasta scala, per quanto ci è noto, solo su reti metropolitane (a Parigi con le motrici chiamate Thomson Double e a Berlino), ma, caso singolare, lo troviamo anche sui locomotori costruiti nel 1926-27 per l'ATAG di Roma. Come si possa realizzare questa connessione, è mostrato in linea di principio dallo schema sottostante.
In a) è lo schema semplificato di una ordinaria motrice a due motori: i contatti J, C1, C2, C3, S, P1, P2 sono quelli di un ordinario controller serie-parallelo ad avviamento reostatico; J ha la funzione di interruttore generale, S pone i due motori M1 ed M2 in serie, P1 e P2 collegano gli stessi in parallelo e C1, C2, C3 escludono successivamente parti del reostato. In doppia trazione, schema b), i motori della motrice pilota M1, M2 sono posti in parallelo fra loro, così come anche quelli della motrice accoppiata; il controller di quest'ultima è inattivo e i contatti di quello della motrice pilota operano sui 4 motori esattamente come nel caso di trazione singola su due motori. L'unica connessione che, attraverso il treno, collega le due motrici è costituita da un conduttore A. All'atto pratico la faccenda si complica notevolmente, perchè:
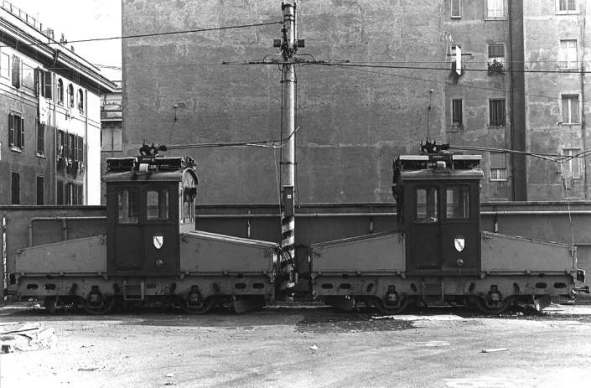
I locomotori ATAG L1-L27 del 1926 I 14 locomotori entrati in servizio nel 1927 sulla rete tramviaria di Roma furono previsti, in origine, per l'accoppiamento in doppia trazione e, almeno in parte, per la marcia autonoma su batteria di accumulatori, anche se entrambe le possibilità non sembra siano mai state sistematicamente utilizzate. La doppia trazione, in particolare, per la scarsa documentazione fotografica trovata, non sembra aver trovato applicazione sui treni merci per le cave, che appaiono tutti muniti di un locomotore in testa e uno in coda e i carri merci non erano certamente muniti di condotta per il comando del locomotore di coda. Può anche darsi che la doppia trazione con locomotori entrambi in testa sia stata utilizzata per alcune linee in pendenza, ad es. per le cave alle pendici di Monte Mario, ma non se ne sono trovate tracce.
Circa la parte elettrica dei locomotori, niente assolutamente è stato trovato nella documentazione ATAG, se non notizie del tutto generiche, l'unica interessante delle quali è il controller utilizzato, il K170-L (del quale peraltro non si sa nulla). Le uniche informazioni, alcune delle quali ricavate solo dall'esame dei rottami oggi esistenti, dalle quali si può partire per ricostruire, con un po' di immaginazione, il circuito di questi rotabili, sono le seguenti:
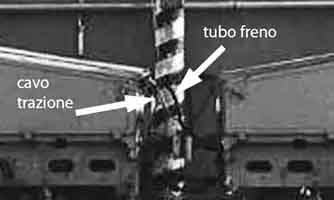
Dal tipo di collegamento tra i due rotabili si deduce che è stato usato come base il sistema Schuckert di comando. Non avendosi tra i due locomotori altri collegamenti all'infuori del cavo di trazione, sembra evidente che gli invertitori saranno stati comandati singolarmente nelle due macchine; da ciò segue che le stesse erano previste per essere entrambe presidiate e solo per accoppiarsi direttamente, senza rotabili intermedi, in modo che i due conducenti potessero intendersi, magari a gesti. Solo la normale marcia avrebbe potuto essere comandata dal locomotore di testa. Circa la manovra dei controller, si può ipotizzare che le cose siano andate nel modo seguente:
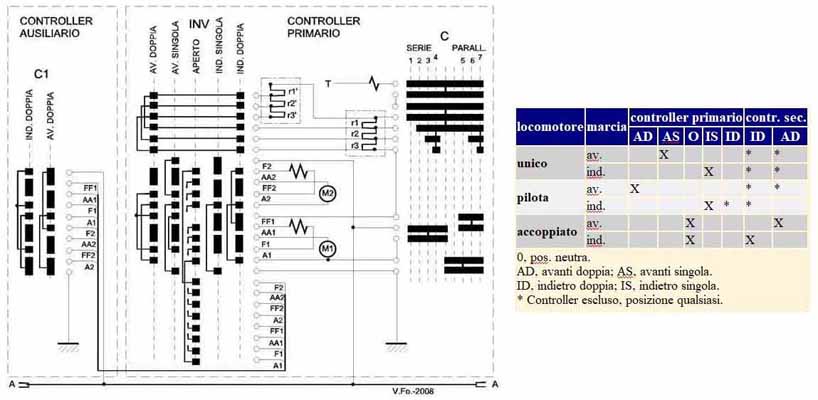
Con questi presupposti è stato sviluppato lo schema sotto riportato.
Osservazioni
Alcune reti tramviarie utilizzanti treni con rimorchiate pilota o unità motrici doppie
Note sull'applicazione a Roma.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
TramRoma, ©1999-2023 - Curatori: Dario Giacomini, Mauro Di Pietrantonio |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ultimo aggiornamento: mercoledì 06 dicembre 2023 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||