La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999
| . |
|
|
|
La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999 |
| . |
|
Home page I Meccanica della locomozione e trazione elettrica |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Note di trazione elettrica. Comando e regolazione della velocità |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
SISTEMI DI COMANDO IN TRAZIONE TRANVIARIA E FERROVIARIA |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Avvertenza. - Quanto sotto esposto si riferisce esclusivamente ai sistemi di trazione elettrica tradizionale, ossia con il sistematico impiego dell'avviamento reostatico; non si tratta in alcun modo degli attuali azionamenti con chopper, inverter e simili e impiego di motori trifasi. Il campo specifico di applicazione dei sistemi illustrati è quello tramviario, metropolitano e ferroviario leggero, per quanto gli stessi si possano integralmente applicare anche alla trazione ferroviaria. Le tecniche illustrate si applicano sia alla trazione su rotaia che a quella filoviaria; negli schemi presentati +T indica il positivo di alimentazione (filo aereo o terza rotaia) e il simbolo di terra indica il negativo (rotaie di corsa o secondo filo aereo in trazione filoviario). | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
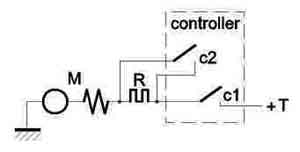
Comando diretto dei motori di trazione Si ha quando l'esclusione del reostato di avviamento, la transizione serie-parallelo e l'eventuale riduzione di eccitazione dei motori di trazione sono direttamente comandati dai contatti del combinatore di marcia o controller, secondo il principio indicato nello schema che segue.
Il contatto c1 del controller chiude il circuito di trazione; il contatto c2 esclude la resistenza R. Il comando diretto è adatto a rotabili di potenza e tensione di alimentazione limitate; è stato tipico per le motrici tramviarie a 2 e 4 motori costruite fino a tutti gli anni Trenta ed in alcuni casi è stato applicato anche alla trazione ferroviaria leggera ad alta tensione; i controller a comando diretto sono di norma posti nelle piattaforme delle motrici in trazione tramviaria, mentre in trazione ferroviaria leggera sono stati anche utilizzate disposizioni con controller unico centrale comandato meccanicamente dai posti di guida (equipaggiamenti Brown Boveri a comando diretto per ferrovie secondarie a 1500-3000 V diffusissimi dal 1925 al 1940 in Italia). Nella storia della trazione tramviaria si sono avuti i più disparati tipi di controller a comando diretto, qualche centinaio di tipi sicuramente se si vanno a cercare le decine di costruttori; i controller tramviari possono però classificarsi nelle seguenti categorie:
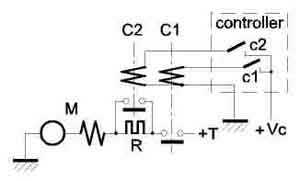
Nella classificazione della General Electric i controller di cui in a), b), d) sono denotati risp. con B, K, L. Controller per comando diretto Comando indiretto dei motori di trazione Si ha quando le operazioni di cui sopra sono comandate dai contatti di teleruttori, comunemente detti contattori, comandati dai contatti del controller, secondo il principio indicato nello schema che segue.
I contatti c1, c2 del controller di manovra danno luogo all'eccitazione dei contattori C1, risp. C2 per la chiusura del circuito di trazione e l'esclusione della resistenza R. La sorgente di alimentazione per le bobine dei contattori è indicata con +Vc; il controller di manovra agisce solo sui circuiti di comando con correnti di limitata intensità e spesso alimentati a bassa tensione. Una ulteriore classificazione di questi sistemi si ha secondo la tecnica utilizzata nel comando del circuito di trazione: si hanno sistemi a servomotore e sistemi a contattori indipendenti. Nei primi un controller direttamente derivato da quelli a comando diretto è azionato da un servomotore elettrico o pneumatico; nei secondi le operazioni sul circuito di trazione sono effettuate da una serie di contattori indipendenti. Dal punto di vista storico, il primo sistema a comando indiretto realizzato è stato quello a servomotore sistema Sprague del 1882, che fu però poco dopo sostituito dai sistemi a contattori indipendenti; questi ultimi tennero praticamente il campo della trazione elettrica fino agli anni Trenta, quando il sistema a servomotore fu nuovamente introdotto negli U.S.A. per le motrici PCC e successivamente impiegato anche in trazione filoviaria. I sistemi a contattori indipendenti si classificano, tra l'altro, in base al metodo di azionamento dei contattori; si hanno i tipi seguenti.
Avviamento manuale ed avviamento automatico Con i sistemi a comando diretto tutta la manovra di avviamento e regolazione di velocità del rotabile è lasciata alla volontà del conducente. Un conducente tranquillo potrà escludere il reostato e passare al parallelo, se necessario, in un tempo ragionevole; un conducente impaziente e frettoloso salterà molte posizioni reostatiche e passerà in parallelo quando ancora la vettura non ha raggiunto la velocità opportuna (tipico esempio di quest'ultimo comportamento è la guida tipo Napoli: si marca il primo punto del controller e, dopo un istante, si porta lo stesso di colpo a fine parallelo). Con il comando indiretto è invece possibile sottrarre, in tutto od in parte, la sequenza di avviamento alla volontà del conducente; in particolare, è possibile ottenere l'esclusione del reostato raggiungendo in ogni passo la massima corrente ammessa nei motori e la massima accelerazione ammessa. I primi sistemi a contattori realizzati dalla Thomson-Houston ricalcano in pieno la tecnica del comando diretto: il controller di comando ha tante posizioni quante sono necessarie per l'avviamento e la transizione serie-parallelo ed è manovrato dal conducente come un usuale controller a comando diretto. Un primo passo per contrastare i conducenti frettolosi è di munire l'albero del controller di comando di un freno elettromagnetico alimentato da una derivazione del circuito di trazione: in caso di superamento, durante l'avviamento, della corrente massima ammessa per i motori, l'intervento del freno elettromagnetico blocca la manetta del controller e non la sblocca se non quando, accelerando il rotabile, la corrente è scesa ad una valore prestabilito. In alcuni casi è interposta una molla tra manetta e albero: l'azione del conducente si limita a caricare la molla, che poi si scarica facendo ruotare l'albero con l'eventuale intervento del freno elettromagnetico. E' da osservare come quest'ultimo sistema, rapidamente caduto in disuso nei primi anni del secolo XX, sia ricomparso con qualche modifica alla fine degli anni Trenta in America come avviatore MRA e si sia molto diffuso in Italia nella trazione filoviaria. Passando a sistemi più evoluti, si è tolta del tutto ai conducenti la possibilità di determinare la velocità di esclusione del reostato e, in parte, il momento della transizione serie parallelo, lasciando tutto il controllo al controller principale. Ciò può avvenire controllando l'avanzamento del servomotore nei sistemi che lo adottino oppure determinando opportunamente la sequenza di azionamento dei contattori che agiscono sul circuito di trazione, in ogni caso basandosi sulla corrente assorbita in ogni istante dai motori di trazione; l'elemento sensibile alla corrente di trazione è un relè opportunemente tarato (sostituibile con un dispositivo elettronico più affidabile e regolabile) che, dal momento che l'accelerazione del rotabile è proporzionale alla corrente di trazione, prende il nome di relè di accelerazione; il sistema è detto accelerazione automatica. Con l'accelerazione automatica il controller di comando ha un numero ridotto di posizioni, che in casi estremi si riducono a tre:
Il conducente ha in tal caso la possibilità di portare la manetta del controller direttamente da zero a fine corsa e l'automatismo inserisce dapprima i motori in serie, esclude gradatamente il reostato, alla riduzione della corrente ad un limite stabilito esegue la transizione e poi esclude nuovamente il reostato per giungere a fine parallelo, con buona pace del conducente frettoloso che non può far niente per accelerare il tutto. In realtà, guardando i vari rotabili che adottano l'accelerazione automatica, si notano il più delle volte più di tre posizioni sui controller, anche cinque o sette; ciò dipende dai seguenti fatti:
Il comando indiretto trova applicazione:
All'atto pratico, già dalla fine degli anni Trenta non si costruiscono più equipaggiamenti a comando diretto, nemmeno per motrici di potenza limitata; gli equipaggiamenti filoviari, salvo sporadiche applicazioni all'inizio del secolo XX, sono sempre stati a comando indiretto, anche perchè un controller a comando diretto è difficilmente realizzabile con un comando a pedale dalla corsa limitata. Caratteristiche base di alcuni tipi di comando indiretto
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Note.
Il comando indiretto si è imposto con l'aumento della potenza dei rotabili motori e soprattutto con la necessità, in primo luogo nelle metropolitane, di comandare più motrici da uno stesso punto (comando multiplo) e di utilizzare rimorchiate di comando (rimorchiate pilota); si è rapidamente sostituito alle iniziali applicazioni di comando diretto di treni reversibili. Con il comando indiretto, in un treno a comando multiplo o con condotta da una rimorchiata, lungo tutto il treno corre solo il cavo di comando, composto da un certo numero di fili percorsi da corrente relativamente debole, eliminando le difficolta di portare la corrente di trazione, ad alta intensità, da un rotabile all'altro.
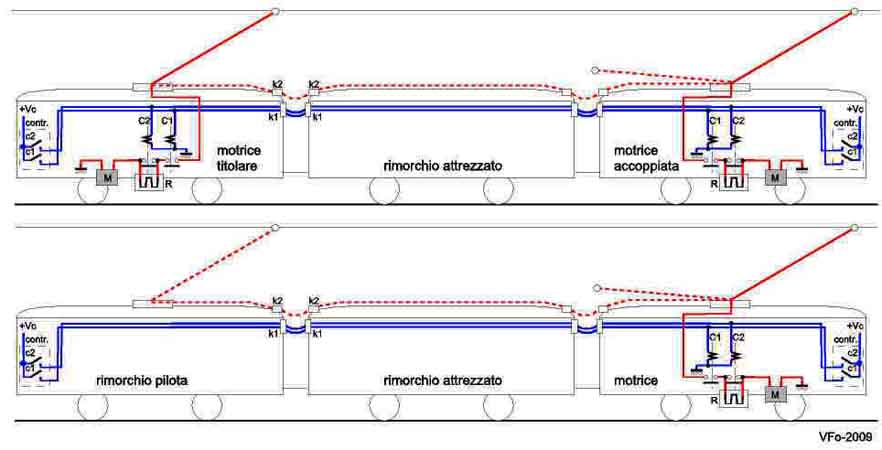
Nelle immagini sovrastanti: applicazione del comando multiplo per la formazione di un treno con due motrici comprendenti un rimorchio (sopra) e di un treno con rimorchio pilota (sotto). Sono rappresentati in rosso i circuiti di trazione in bleu quelli di comando. Le parti tratteggiate si riferiscono ai casi in cui si voglia avere la presa di corrente sempre sulla sola vettura di testa, come è necessario sulle reti urbane dotate di scambi a comando elettromeccanico (lo scambio è comandato dal passaggio del trolley sotto una slitta ed è la corrente assorbita dai motori che ne comanda l'azionamento); in questo caso, oltre al cavo di comando facente capo agli accoppiatori k1, necessita il cavo di trazione collegato con gli accoppiatori k2 che alimenta la motrice in coda dal trolley della vettura di testa. Questo sistema è stato talvolta criticato, in quanto uno dei vantaggi del comando indiretto è di non avere conduttori percorsi da corrente ad alta intensità tra i rotabili, vantaggio che è parzialmente annullato dalla presenza del cavo di trazione. I sistemi a comando multiplo che più hanno avuto diffusione nel primo ventennio del secolo XX sono quelli sviluppati dalla Thomson-Houston, dalla Westinghouse e dalla Dick, Kerr; successivamente altre ditte si sono specializzate in questo campo, tra le quali in Italia hanno assunto rilevante importanza il Tecnomasio Italiano Brown Boveri (TIBB), la Marelli e l'Ansaldo. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
TramRoma, ©1999-2023 - Curatori: Dario Giacomini, Mauro Di Pietrantonio |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ultimo aggiornamento: mercoledì 06 dicembre 2023 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||