La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999
| . |
|
|
|
La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999 |
| . |
|
Home page I Meccanica della locomozione e trazione elettrica |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Note di trazione elettrica. Equipaggiamenti di comando e trazione |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
EQUIPAGGIAMENTO CGE CON AVVIATORE MRA |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
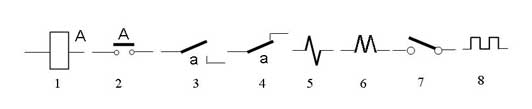
Significato dei simboli usati negli schemi
Se un relè porta più di un contatto, i vari contatti sono contraddistinti da numeri in apice (ad es., se il relè A ha tre contatti, gli stessi sono denotati con aI, aII, aIII). L'indicazione +T indica l'alimentazione da linea di contatto, 550 V; quella B+ indica l'alimentazione dei circuiti a bassa tensione da batteria di accumulatori a 36 V nominali. Il ritorno comune dei due circuiti, le rotaie di corsa, sarà indicato con "terra". Nota. - Gli schemi sotto riportati sono ricavati semplificando quelli originali con l'eliminazione di circuiti e componenti non essenziali (ad es. comando delle sabbiere, carica della batteria, ecc.). Il circuito di trazione comprende quattro motori, stabilmente collegati due a due in serie, indicati con 1-2 e 3-4 sugli schemi; le due coppie sono accoppiabili in serie e in parallelo nel modo usuale. L'avviatore è ad albero ad eccentrici (detto anche a cammes) con undici eccentrici che comandano altrettanti contatti di chiusura, numerati sugli schemi da 1 a 11, che operano sul circuito di trazione; l'albero può ruotare nei due sensi di quasi 360°, azionando i vari contatti a seconda del profilo dei relativi eccentrici. Dalla posizione di riposo (pos. 0) si passa alle successive posizioni con i motori collegati in serie dal contattore di serie S, escludendo man mano gruppi di resistenze si giunge all'ultima posizione corrispondente al reostato escluso (fine serie, circa 360°); successivamente, aperto S e chiusi i contattori di parallelo P e G, l'albero può ruotare in senso inverso passando dapprima per la posizione di transizione a ponte e successivamente escludendo gradualmente il reostato con i motori in parallelo. La posizione di riposo dell'avviatore è la pos. 1, che è anche posizione di fine parallelo; le due posizioni coincidono quindi meccanicamente, mentre elettricamente sono distinte dall'eccitazione dei contattori P e G e dalla differente situazione del circuito di comando.
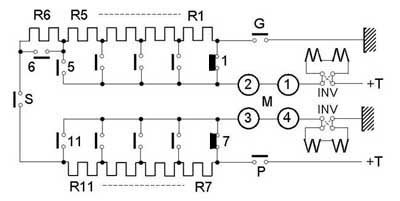
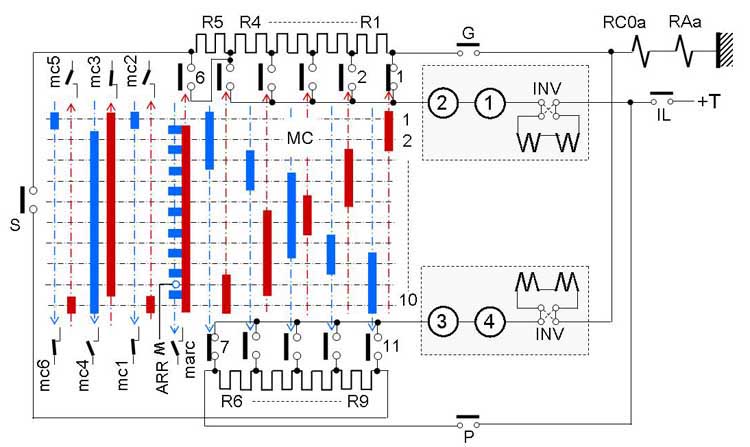
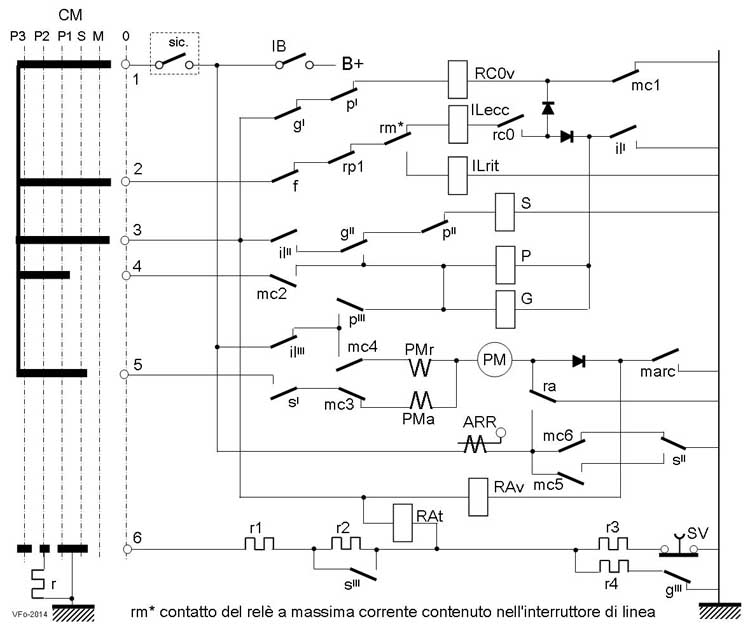
Nel seguito è riportato lo schema in dettaglio dell'avviatore e dei dispositivi di comando associati. L'avviatore è indicato con MC (Master Controller**); oltre ai contatti 1-11 prima citati e riportati nella successiva tabella A per le varie posizioni, dispone dei seguenti contatti ausiliari: mc1-6, che chiudono nelle posizioni indicate nella tabellina sottostante; marc, contatto detto di interposizione, chiude nell'intervallo tra due posizioni successive dell'albero. Si nota che in posizione di riposo sono chiusi i contatti 1 e 7 e gli ausiliari mc1, 3, 6. ARR è un elettromagnete di blocco che, se eccitato, blocca meccanicamente l'albero a camme sulla posizione attuale. L'avviatore è azionato da un servomotore elettrico (Pilot Motor), mostrato nello schema del circuito di comando, a due avvolgimenti di campo PMa e PMr per i due sensi di marcia. Nella rappresentazione grafica dell'avviatore sullo schema, si sono indicate in rosso le camme che azionano i contatti 1-6, mc2-3-5 e in bleu quelle relative ai contatti 7-11, mc1-4-6, mentre negli stessi colori sono disegnate le frecce; in tal modo è relativamente semplice identificare i contatti chiusi per ogni posizione dell'albero. Il reostato di avviamento è formato dai due gruppi di resistenze R1-6 inserite dai contatti 1-6 dell'avviatore, R7-11 inserite dai contatti 7-11. Nel circuito sono presenti i tre contattori di combinazione motori già citati, S per la combinazione in serie e P, G per quella di parallelo, il contatto IL dell'interruttore di linea e le due bobine amperometriche RC0a (relè di corrente minima) ed RAa (relè di accelerazione); si veda oltre. L'interruttore di linea è molto simile a quello utilizzato nelle motrici a comando diretto, con la differenza che è alimentato a bassa tensione da batteria, anziché dalla linea di contatto; consta di una bobina di chiusura ILecc che apre e chiude il circuito di trazione in condizioni normali, mentre in condizioni di sovraccarico interviene una bobina amperometrica che provoca l'intervento della bobina di ritenuta ILrit che apre il circuito di ILecc; ILrit si tiene su un proprio contatto e cade al riporto a zero del controller di marcia. Il controller CM dell'usuale tipo a manovella dispone di cinque posizioni, oltre alla posizione di riposo (pos. 0): M, manovra, avvia il rotabile con i motori in serie e tutto il reostato incluso; S, serie, sempre con i motori in serie esclude gradatamente il reostato sotto il controllo del relè di accelerazione (ved. oltre); P1, P2, P3, parallelo con tre gradi di accelerazione, passa i motori in parallelo ed esclude gradatamente il reostato con tre diverse tarature del relè di accelerazione, ossia con tre diversi valori di accelerazione. Il controller dispone di sei banchi di contatto che saranno di seguito indicati con CM/1-CM/6 e comprende anche l'invertitore di marcia, indicato con INV sugli schemi, che inverte le connessioni indotto-eccitazione per i due sensi di marcia del rotabile.
Tab. A - Successione di azionamento per le posizioni dei controller di marcia e freno.
I contatti 1, 2,... 11 ed mc1,2,... 6 dell'avviatore sono mostrati nella configurazione corrispondente alla pos. 1 (posizione di riposo). Per la comprensione del seguito si segua lo schema generale del circuito di comando e trazione e la tabella degli azionamenti. Avviamento del rotabile (controller in pos. M) Si suppone che il conducente abbia eseguito le operazioni preliminari per l'avvio del rotabile, ossia allentamento dei freni (ved. oltre), chiusura dell'interruttore di batteria IB e chiusura delle porte, con la quale ultima operazione si chiude il circuito di sicurezza indicato sullo schema dall'interruttore sicur.; l'alimentazione da batteria B+ è così fornita al banco 1 del controller. Il controller CM è portato in pos. M. Dal banco CM/3 il contattore RC0 è fatto eccitare sull'avvolgimento RC0v tramite i contatti di riposo gI, pI ed mc1 (quest'ultimo chiuso essendo MC in pos. di riposo; per la funzione di RC0 ved. Interruzione dell'alimentazione). Chiuso il contatto rc0 di RC0, chiude l'interruttore di linea eccitando sull'avvolgimento ILecc tramite i contatti di riposo f, rp1, rm, il contatto di lavoro chiuso rc0 e terra da mc1; f ed rp1 sono elementi relativi al circuito di frenatura che garantiscono che il relativo circuito sia in posizione di riposo, mentre rm è il contatto che apre l'interruttore di linea per massima corrente. Dallo stesso banco CM/3, con ilII chiuso tramite gII e pII eccita il contattore di serie S. Sono chiusi pertanto IL, S e i contatti 1 e 7 dell'avviatore con lo stesso in posizione di riposo; il circuito di trazione è chiuso con i motori in serie e il reostato incluso e il rotabile si avvia e velocità ridotta, che resta costante finché non si sposta ulteriormente il controller (marcia in tenuta). Marcia del rotabile in serie (controller in pos. S) Portando CM in pos. S, ai circuiti di cui sopra si aggiunge quello facente capo al banco CM/5: con sI chiuso si avvia il servomotore PM dell'avviatore MC sull'avvolgimento di campo PMa, tramite il contatto ra in posizione di riposo e l'avviatore si porta in pos. 2 chiudendo il contatto 6 che esclude la resistenza R5 (vedi tabella). Abbandonando MC la pos. 1, si apre il contatto mc1, ma ILecc si tiene da terra sul proprio contatto ilI. Nel passaggio di MC dalla pos. 1 alla pos. 2, si chiude il contatto di interposizione marc che dà alimentazione alla bobina, detta di preeccitazione, RAv del relè di accelerazione RA con B+ proveniente da CM/3; RA eccita e dà terra all'elettromagnete di blocco ARR che arresta l'avviatore sulla pos. 2. Con MC in pos. 2 marc è di nuovo aperto e non solo l'alimentazione al servomotore è interrotta, ma è anche interrotta la terra alla bobina RAv: RA cadrebbe, se non fosse mantenuto dalla propria bobina amperometrica RAa inserita nel circuito di trazione; solo quando la corrente in RAa, a causa dell'aumento di velocità del rotabile, scende al di sotto di un limite prestabilito RA cade e reinserisce l'alimentazione al servomotore, che si riavvia portando l'avviatore verso la pos. 3. Si ripete quindi il funzionamento sopra riportato per la pos. 2 e l'avviatore potrà avanzare fino alla posizione di fine serie 10 fermandosi ad ogni passo e attendendo che la corrente nel circuito di trazione scenda al di sotto del limite; in pos. 10, con i contatti 5, 6 e 11 chiusi il reostato è tutto escluso. Occorre notare che il relè di accelerazione, oltre alle bobine RAv ed RAa, ha una terza bobina, di taratura, RAt e di conseguenza la corrente limite al di sotto della quale RA cade è determinata dalla corrente circolante sia in RAa (corrente di trazione) che in RAt (corrente di taratura); quest'ultima crea un flusso magnetico che si aggiunge a quello creato da RAa e tende quindi ad aumentare la sensibilità del relè di accelerazione. La corrente in RAt è determinata dal valore di resistenza inserito nel suo collegamento a terra tramite le resistenze r1, r3 ed r4 (r2 è cortocircuitata e quindi esclusa da sIII, mentre r3 ed r4 sono tra loro in parallelo); con questo collegamento la sensibilità del relè di accelerazione è regolata ad un valore di default, che può però essere ridotto azionando il pulsante detto di svincolo SV che, escludendo r3, aumenta la corrente in RAt; questa possibilità dovrebbe essere utilizzata dai conducenti in alcune condizioni di carico, ad es. su forti salite, nelle quali il relè di accelerazione non riesce a ricadere spontaneamente a causa della elevata corrente di trazione (dovrebbe, perché molti conducenti la usavano per accelerare indebitamente l'avviamento). Analizzando il circuito si vede che con CM in pos. S la corrente in RAt è data dal parallelo di r1, r3 ed r4; azionando SV si esclude r3 e restano in parallelo solo r1 ed r4, riducendosi la corrente. Marcia del rotabile in parallelo (controller in pos. P1, P2 o P3) Portando CM in pos. P1, ferme restando le operazioni dei banchi 1-3, dal banco 4 eccitano i contattori di parallelo P e G con terra tramite il contatto mc2; risultano quindi eccitati simultaneamente S, P, G; nell'avviatore si ha la fase di transizione, nella quale la metà del reostato costituito dalle resistenze R1-R4 è collegata a terra da G, mentre l'altra metà, resistenze R7-10, è collegata a +T da P (R5 è cortocircuitata dal contatto 6) e i due gruppi di motori sono alimentati da +T in serie; l'avviatore resta in pos. 10, che è l'ultima nella corsa di andata. Da pII aperto cade S e si interrompe la connessione in serie dei motori, che risultano invece alimentati separatamente tra +T e terra in serie alle due metà del reostato: è la prima posizione del collegamento in parallelo (esempio semplificato della transizione a ponte). Con P eccitato si alimenta il servomotore PM dell'avviatore MC sull'avvolgimento di campo PMr da mc2, pIII, mc4; PM si avvia quindi in senso contrario al precedente, facendo spostare MC dalla pos. 10 verso la 9 e si ripetono esattamente le operazioni prima viste per il collegamento in serie: intervengono il contatto di interposizione e il relè di accelerazione e l'avviatore viene successivamente comandato a ritroso sulle posizioni 8, 7, ecc. fino a giungere alla 1 nella quale i due gruppi di resistenze sono esclusi e ogni coppia di motori è alimentata direttamente tra T+ e terra. Se il controller è mantenuto in pos. P1, la taratura del relè di accelerazione RA è ora diversa da quella utilizzata in serie, essendo inclusa la resistenza r2 ed esclusa r4. Ma se il conducente porta CM in P2, nel circuito di taratura di RA è inserita la resistenza addizionale r compresa in CM: si riduce la sensibilità di RA che cade ad una corrente di trazione minore, ossia il rotabile si avvia con una maggiore accelerazione e questa accelerazione potrà ancora essere aumentata di un gradino portando CM in P3, nella quale posizione ogni resistenza addizionale è esclusa. In ognuna delle tre posizioni, si può poi avere una ulteriore desensibilizzazione di RA azionando il pulsante SV. Riporto del controller in pos. 0 Si hanno i seguenti casi a seconda della posizione attuale del controller, ossia della posizione a partire dalla quale lo stesso è riportato in pos. 0:
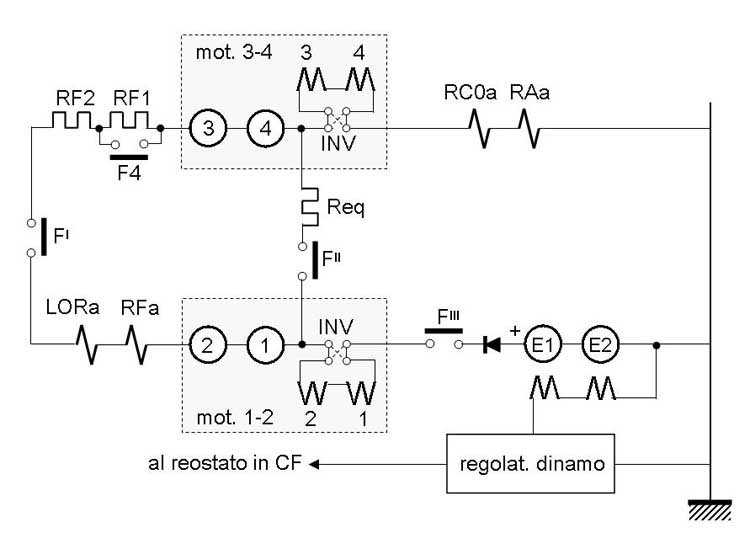
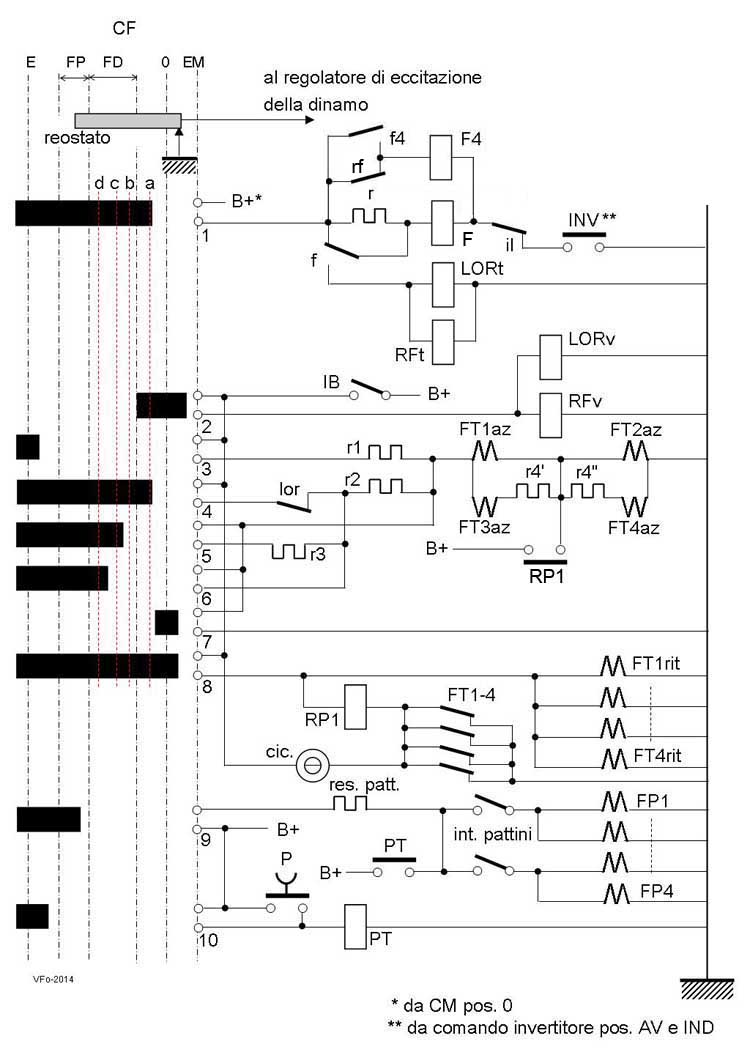
Interruzione dell'alimentazione Il relè di corrente minima RC0 è eccitato sull'avvolgimento RC0v allo spostamento di CM da 0 ad M, ma quando l'avviatore abbandona la pos. 1 perde questa alimentazione a causa dell'apertura di mc1; RC0 non cade mantenendosi sull'avvolgimento RC0a percorso dalla corrente di trazione. Fintanto che il circuito di trazione è chiuso e regolarmente alimentato RC0 si mantiene eccitato ma, se viene a mancare la tensione di linea, ad es. per il passaggio del rotabile sotto un sezionatore, cessando momentaneamente la corrente di trazione, RC0 cade provocando con rc0 l'apertura dell'interruttore di linea e di conseguenza il ritorno dell'avviatore nella posizione di riposo, esattamente come nel caso in cui il controller sia stato riportato in pos. 0. Ripristinandosi la tensione di linea, se CM è ancora nella posizione precedente, si ripete la successione delle operazioni di avviamento ed esclusione del reostato. Ciò evita che nel caso in cui il conducente, contro le prescrizioni, non riporti in pos. 0 il controller prima di passare sotto il sezionatore, lo sforzo di trazione si annulli momentaneamente per riprendere poco dopo alla massima intensità, con possibili danni alle trasmissioni, in particolare alle coppie coniche, sempre sensibili alle brusche inversioni di coppia. Segnalazione di reostato inserito E' data da una lampada posta in parallelo all'indotto di PM (non mostrata nello schema), che si accende pertanto durante l'esclusione del reostato e al riporto a riposo dell'avviatore da fine serie. Il rotabile dispone di tre sistemi di frenatura: frenatura reostatica, freno a tamburo sui quattro assi, pattini elettromagnetici due per carrello. I tre freni sono comandati da un controller di frenatura CF che, oltre alla posizione di riposo (pos. 0), dispone di due settori ad azione moderabile FD (frenatura dinamica,nella quale interviene anche il freno a tamburi) ed FP (frenatura a pattini), oltre ad una posizione E (emergenza), con 10 banchi di contatti; la manetta del freno è estraibile solo in una posizione antecedente alla pos. 0 (pos. EM). E' del tutto indipendente dal circuito di trazione e non interessa l'avviatore MC. Il circuito di frenatura, riportato nella parte superiore dello schema che segue, si forma con l'eccitazione del contattore F che segue allo spostamento del controller di frenatura dalla posizione di riposo. In frenatura reostatica i quattro motori sono collegati tra loro in serie, formando due circuiti: il circuito di freno, nel quale gli indotti dei motori sono chiusi sulle resistenze RF1, RF2 e il circuito di eccitazione nel quale le bobine di campo dei motori sono collegate alle dinamo E1, E2 di carica della batteria. Il campo della dinamo è a sua volta alimentato dalla batteria di accumulatori attraverso un reostato comandato dal combinatore CF. In tal modo la frenatura reostatica è moderabile per tutto il settore FD di CF. Nota. - Nella disposizione originale dei rotabili le dinamo sono normalmente collegate per la carica della batteria di accumulatori e in frenatura reostatica sono staccate dalla batteria ed utilizzate per l'eccitazione di campi dei motori; con l'introduzione, negli anni Ottanta, di un inverter per la carica delle batterie alimentato dalla tensione di linea, le dinamo sono utilizzate esclusivamente nella frenatura reostatica. Intervengono anch'essi nel settore FD del controller di frenatura. Ogni freno a tamburo è montato sull'albero di un motore e lo sforzo frenante si trasmette dalle ruote attraverso la coppia conica della trasmissione. Ogni freno è comandato da un dispositivo elettromagnetico (Brake Actuator) che provvede sia alla frenatura di esercizio che a quella di emergenza ed è dotato di due elettromagneti comandati dalla batteria di accumulatori: uno di azionamento e uno di ritenuta. Il primo è ad azione diretta, ossia se eccitato esercita l'azione frenante sul tamburo con intensità dipendente dalla corrente che lo attraversa; l'altro è ad azione inversa, ossia se è diseccitato blocca il freno sul tamburo. Quest'ultima funzione garantisce la frenatura del rotabile in caso di interruzione dei circuiti di alimentazione, scarica della batteria e simili. Freni a pattini elettromagnetici Col controller di frenatura nel settore FP intervengono i pattini elettromagnetici presenti in due su ogni carrello; sono alimentati dalla batteria di accumulatori e dispongono di due gradi di frenatura. Funzionamento dell'apparato frenante La parte superiore dello schema che segue riporta il circuito dei motori configurato in frenatura reostatica; nella parte inferiore sono riportati i dispositivi di comando del freno reostatico, di quello a tamburo e di quello a pattini. Nel seguito indicheremo con CF il controller di frenatura e con BA i Brake Actuators.
Con tensione di batteria presente, interruttore IB chiuso, in qualsiasi posizione di CF, se la manetta del freno è regolarmente inserita, sono alimentate le bobine di ritenuta FT1-4rit dei quattro BA (da CF, banco 8) e i freni sono quindi aperti; estraendo la manetta del freno con CF in pos. EM si interrompe il circuito delle bobine di ritenuta e il rotabile si frena sui tamburi. Il sistema dispone di due relè tarati che regolano l'accelerazione in frenatura: LOR (Lock Out Relay) ed RF dotati di bobine di preeccitazione LORv, FRv, di taratura LORt, RFt ed amperometriche LORa, RFa; il funzionamento di questi relè risulterà chiaro dal seguito. Controller di frenatura in pos. 0 Dal banco 2 sono alimentate le bobine di preeccitazione LORv, FRv; LOR ed RF sono quindi eccitati. Frenatura reostatica iniziale ad accelerazione costante CF è spostato di un piccolo angolo oltre la pos. 0 senza arrivare al settore FD (traccia a). Dal banco 1 eccita il contattore F che chiude in F', F", F"' (ved. schema superiore) il circuito dei motori e di eccitazione dei campi; il reostato collegato a CF inserisce una ridotta parte della resistenza verso massa nel collegamento al regolatore della dinamo e di conseguenza si ha una ridotta eccitazione dei campi dei motori, alla quale corrisponde una debole azione frenante che resta costante finché non si sposta ulteriormente la manetta. Da f si alimentano le bobine di taratura LORt, RFt di LOR ed RF. Questa fase corrisponde alla marcia in tenuta all'avviamento. Il circuito di eccitazione dei campi dei motori è realizzato in modo che aumentando la resistenza nel reostato in CF aumenta l'eccitazione delle dinamo e di conseguenza la corrente fornita ai campi; ciò dipende evidentemente dalla costituzione del regolatore delle dinamo. Frenatura reostatica ad accelerazione variabile e intervento dei freni a tamburo Con un ulteriore spostamento della manetta in CF si entra nella parte iniziale del settore FD (traccia b). Il reostato in CF incrementa la resistenza inserita nel circuito, aumentando l'eccitazione dei campi dei motori e di conseguenza l'azione del freno reostatico; si interrompe, dal banco 2, la preeccitazione di LOR ed RF, ma i due relè restano attratti mantenendosi sulle relative bobine amperometriche LORa, RFa attraversate dalla corrente di frenatura, con l'ausilio della corrente fornita alle bobine di preeccitazione di taratura LORt, RFt (cioè le ampere-spire somma delle bobine di preeccitazione e di taratura sono sufficienti a mantenere attratti i relè). I relè LOR e RF sono ritardati in caduta dal condensatore C posto in parallelo a LORv e FRv per coprire il tempo necessario alla corrente reostatica a raggiungere un valore sufficiente a garantirne la tenuta su LORa e RFa. Il circuito resta in questa configurazione fintanto che RF è eccitato; riducendosi però la velocità del rotabile, la corrente di frenatura si riduce gradatamente e, scesa al di sotto del valore che insieme alla corrente di taratura in RFt ne garantisce la tenuta, questo relè cade, facendo eccitare F4 (banco 1, da rf; poi F4 si tiene dal suo contatto f4). Nel circuito di frenatura il contatto F4 esclude la resistenza RF1, ciò che dà un incremento della corrente di frenatura e quindi dell'effetto frenante. Il circuito è ora stabile fintanto che LOR è eccitato, ma ancora, riducendosi la velocità del rotabile, si riduce la corrente di frenatura ed anche LOR ad un certo punto cade; ora la frenatura reostatica è praticamente conclusa e la caduta di LOR avvia la frenatura meccanica a mezzo dei freni a tamburo che si ha alimentando, dal banco 4 attraverso lor, le bobine di azionamento FT1-4az in serie alla resistenza r2. Si nota quindi che le ampere-spire di tenuta di RF e LOR devono essere tali che alla soglia superiore di corrente cada RF ma LOR si tenga, cadendo invece alla soglia inferiore. Segnalazione di fine frenatura reostatica L'accensione di una lampada sul banco segnala al conducente la fine della frenatura reostatica e l'entrata in funzione dei freni a tamburo. Incremento dell'azione dei freni a tamburo Se lo spostamento iniziale della manetta del freno nel settore FD è andato oltre la traccia b, raggiungendo la c o la d od anche se all'iniziale spostamento ne è seguito un ulteriore, si ha lo stesso funzionamento descritto, con la differenza che l'azione frenante dei freni a tamburo può essere aumentata in due passi: sulla traccia c in parallelo alla resistenza r2 è posta la r3, mentre in traccia d le bobine di azionamento sono direttamente collegate al B+ senza resistenze. Intervento dei pattini elettromagnetici Con la manetta del freno nel settore FP i pattini elettromagnetici sono alimentati dal B+ in serie ad una resistenza. Gli stessi possono essere anche azionati in qualsiasi momento a mezzo di un pulsante presente sul banco e in tal caso sono alimentati direttamente dal B+ senza interposizione di resistenza. Con la manetta sull'ultima posizione di CF, pos. E, si ha l'intervento della frenatura reostatica con la massima intensità, l'alimentazione dei freni a tamburo con una ridotta resistenza e l'alimentazione diretta dei pattini elettromagnetici; in questa fase i freni a tamburo sono alimentati indipendentemente da LOR ed entrano in azione senza attendere la riduzione della corrente di frenatura reostatica. Abbandono e ripristino del rotabile Volendo lasciare il rotabile incustodito e frenato, il conducente deve portare la manetta del freno in posizione di estrazione ed asportare la stessa, oltre ad aprire l'interruttore di batteria IB. Al ripristino, con la chiusura di IB, trovandosi i freni a tamburo bloccati, si ha il suono di un ronzatore (cic., cicalino, sullo schema), che cessa quando il conducente innesta la manetta del freno sul controller e la porta in pos. 0. Alcuni dettagli non chiari nel circuito dei freni
_________________ (*) Diamo spesso il termine inglese di alcuni componenti, come si trovano sulla letteratura tecnica anglo-americana oggi largamente disponibile in rete. Fonti. Per la storia delle PCC e per la descrizione dei relativi circuiti sono state utilizzate le seguenti fonti:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
TramRoma, ©1999-2023 - Curatori: Dario Giacomini, Mauro Di Pietrantonio |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ultimo aggiornamento: mercoledì 06 dicembre 2023 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||