La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999
| . |
|
|
|
La storia del trasporto pubblico di Roma raccontata con passione e per passione. Sito fondato da Vittorio Formigari, online dal 1999 |
| . |
|
Home page I Meccanica della locomozione e trazione elettrica |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Meccanica tranviaria e ferroviaria |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
CONTROLLER A COMANDO DIRETTO |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
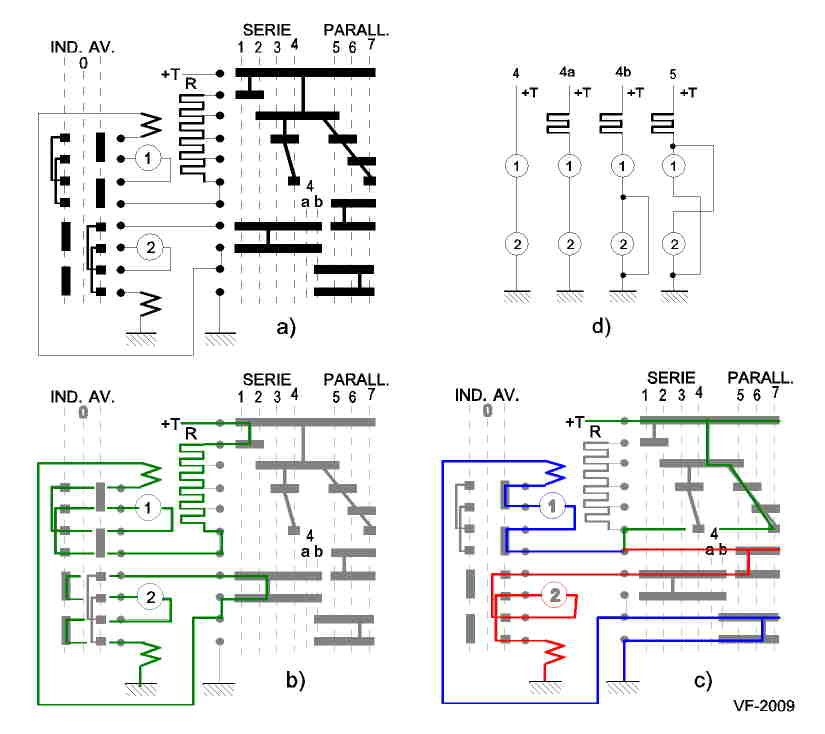
a) Schema semplificato del circuito di trazione di un controller a comando diretto
per due motori tramviari, con 4 posizioni di connessione in serie dei motori
e 3 in parallelo, con
transizione serie-parallelo
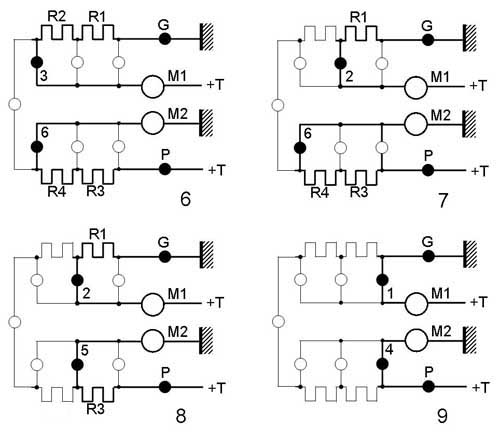
per corto circuito di un motore. Un circuito per la transizione a ponte Gli schemi che seguono riportano il funzionamento di un controller per transizione a ponte di due motori. Il circuito, ovviamente semplificato, consta del controller costituito dai contatti 1-6, dal reostato R1-R6 e dai contatti S per la connessione in serie dei motori e P, G per la connessione in parallelo; il controller potrebbe corrispondere ad un tipo con albero a cammes che, ruotando nei due sensi, chiude e apre i contatti (fig. A).
Nella fig. B sono mostrati i circuiti che si combinano in alcune posizioni del controller; i due motori sono indicati dai numeri 1 e 2 compresi nei cerchi, i contatti 1-6, S, G, P se aperti sono indicati col cerchietto bianco, se chiusi col cerchietto nero; +T indica l'alimentazione dal trolley, il segno di terra il ritorno alle rotaie.
Nella tabella sottostante sono riportati, per ognuna delle 10 posizioni (tacche) del controller, i contatti chiusi, le resistenze inserite e alcune note sulle varie configurazioni.
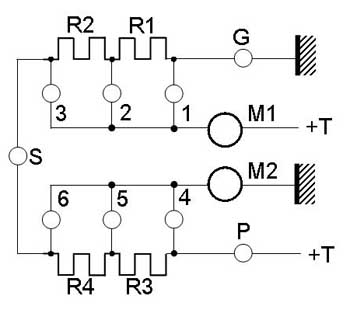
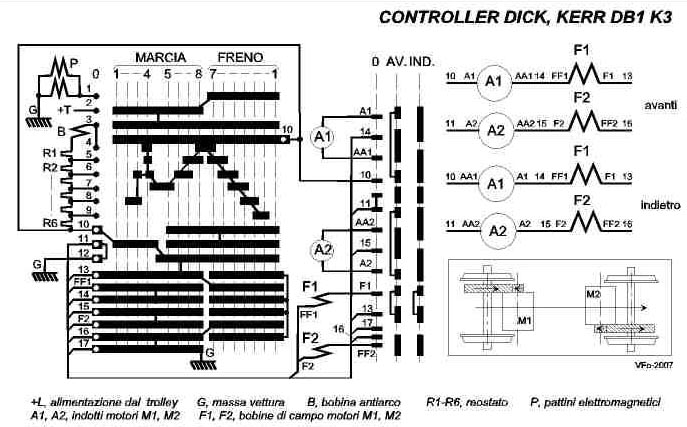
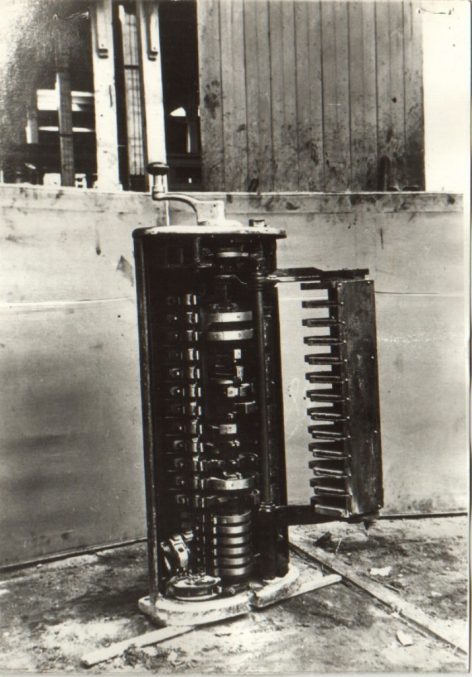
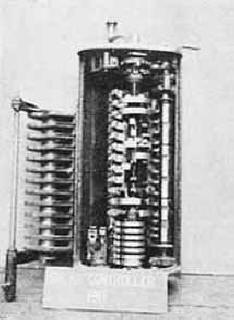
Alcuni tipi di controller utilizzati in trazione tramviaria fino agli anni Trenta Il costruttore indicato per i vari tipi è solo l'originario detentore del brevetto, in quanto i vari controller sono stati in seguito costruiti su licenza da varie ditte. La fig. 1 riporta lo schema semplificato del controller in oggetto, uno dei più semplici e più diffusi controller dal 1900 al 1930; sono stati omessi i dettagli relativi all'esclusione dei motori. In questo schema:
Nota. - La convenzione di raddoppiare la lettera di riferimento per un estremo degli avvolgimenti equivale a quella, utilizzata in elettronica, di indicare con un punto gli estremi concomitanti di due avvolgimenti.
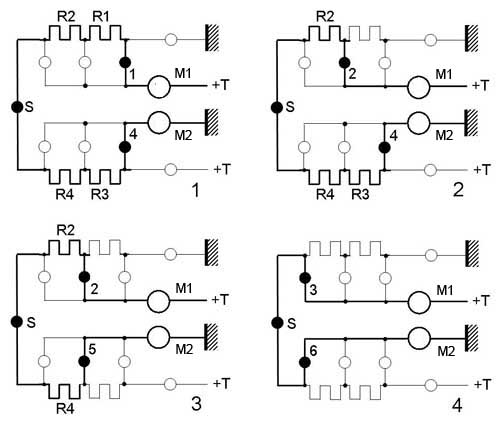
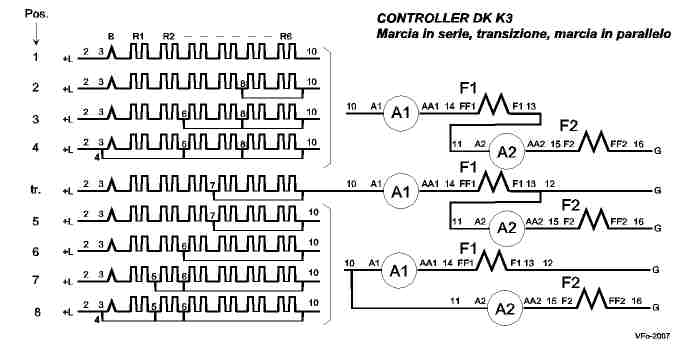
Negli schemi che seguono i circuiti sono riportati con l'indicazione dei numeri della spazzole utilizzate; ad es. il primo circuito della fig. seg. deve essere letto: + da trolley-spazzola 2-spazzola 3-bobina anti arco-resistenza R1-...-resistenza R6-spazzola 10-spazzola A1-indotto mot. 1-spazzola AA1-...ecc. fino all'indicazione G, che sta per negativo di alimentazione. La fig. 2 dà la successione dei circuiti realizzati dal controller nelle posizioni di marcia; le pos. 1-4 corrispondono alla marcia con i motori M1 ed M2 in serie e successivamente, attraversando la posizione di transizione tr sulla quale il controller non può (o non deve?) essere fermato, si passa alle posizioni 5-8 di marcia in parallelo. La marcia in serie si avvia con tutto il reostato R1-R6 inserito, che viene poi escluso a due resistenze alla volta nelle posizioni 2 e 3 fino ad essere tutto escluso in 4, insieme alla bobina spegni arco B del controller, che, traversata dalla corrente del circuito di trazione, spegne gli archi che si formano sui contatti tra spazzole e settori. La transizione tra serie e parallelo si ottiene in tr. reinserendo la parte R1-R3 del reostato e cortocircuitando il motore M2; da 5 in poi il motore M2 è collegato in parallelo allo M1 e la parte reinserita del reostato è gradualmente ridotta fino ad annullarsi in 8, dove è ancora esclusa dal circuito la bobina anti arco.
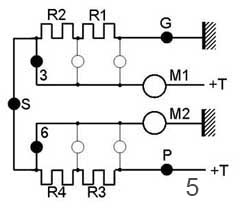
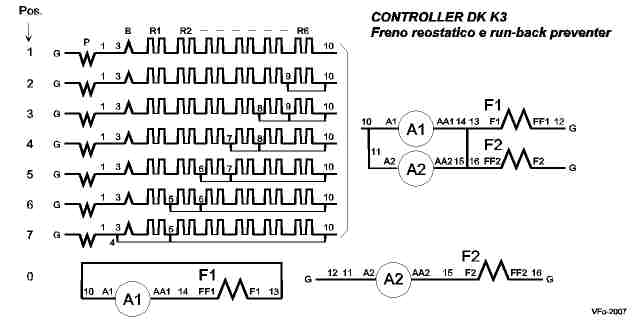
La fig. 3 dà invece l'analoga successione nelle posizioni di frenatura reostatica, durante la quale intervengono sempre, se presenti, i freni a pattini alimentati dalla corrente di frenatura. Il circuito è simile a quello di marcia, ma inizia con la massa applicata alla spazzola 1 del controller in serie con i due avvolgimenti dei pattini, in parallelo tra loro. I motori sono connessi come indica la parte destra della figura, ossia sono tra loro in parallelo e chiusi sul reostato, la bobina anti arco e le bobine dei pattini, con l'aggiunta del collegamento stabilizzatore trasversale 14-15 che garantisce, se di resistenza sufficientemente ridotta, che la tensione sull'indotto e sull'induttore resti sempre la stessa sulle due macchine, evitando il rischio di instabilità segnalato per il caso del controller K10. Dalla posizione 1 alla 7 il reostato è escluso una resistenza alla volta; in 7 i due motori alimentano i soli pattini ed è anche esclusa la bobina anti arco. Nella stessa fig. 3 si nota che in posizione 0 del controller i due motori sono singolarmente chiusi in corto circuito: è il così detto run-back preventer, che impedisce che la vettura, lasciata in pendenza senza altri freni, possa acquistare spontaneamente velocità, intervenendo subito la frenatura reostatica. Il dispositivo, per funzionare, richiede che l'invertitore di marcia sia predisposto per il senso di marcia contrario a quello che si vuole prevenire; se la vettura si ferma in salita, il conducente dovrà lasciare l'invertitore nella posizione in cui si trova, ma se si ferma in discesa dovrà porlo in marcia indietro, per stare tranquillo.
Negli schemi di cui sopra non è stato mostrato il dispositivo di esclusione dei motori, che si ottiene estraendo, in posizione 0, la manetta dell'invertitore ed inserendola in un apposito attacco previsto sul retro del controller. Ruotando la manetta, in tale posizione, in un senso o nell'altro di 90°, si dà luogo all'innalzamento od all'abbassamento del cilindro dell'invertitore, che esclude il motore M1 (verso l'alto) o il motore M2 (verso il basso). Questo è il motivo per cui sull'invertitore si trovano la spazzola 17 e la doppia spazzola 11, che altrimenti non avrebbero alcuna funzione. Il controller è dotato di un dispositivo meccanico che impedisce l'avanzamento continuo della manovella di marcia nel solo senso di accelerazione, obbligando il conducente a fermarsi per un istante su ogni tacca; la manovella di marcia non è estraibile, ma è bloccata meccanicamente con la manetta dell'invertitore in posizione neutra o estratta.
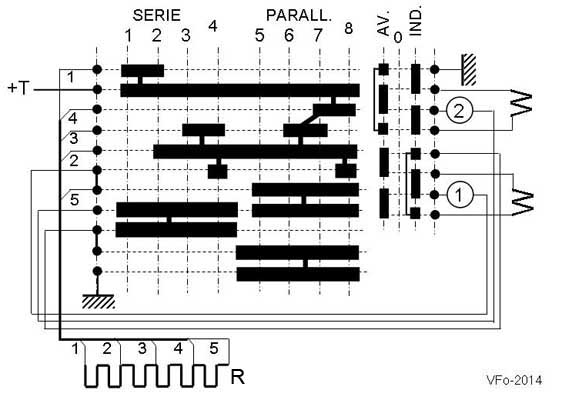
Controller Thomson-Houston K10
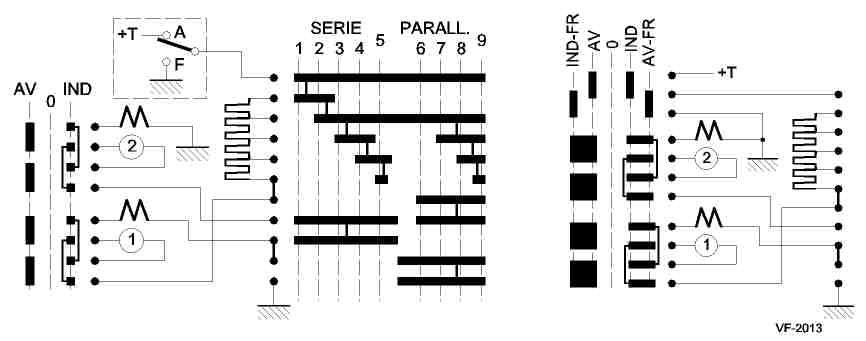
La figura dà, a sinistra, uno schema semplificato del controller K10 a quattro posizioni di marcia in serie e altrettante in parallelo; il controller è stato largamente impiegato dalla SRTO. Nonostante che il controller non preveda posizioni di freno elettrico di nessun tipo, è ugualmente possibile ottenere la frenatura reostatica della motrice, con la seguente procedura. L'interruttore generale ha una posizione A di marcia ed una F nella quale il circuito di trazione è staccato dall'alimentazione e posto a terra, ossia in corto circuito; per inserire il freno reostatico il conducente è tenuto ad eseguire le seguenti manovre:
Con queste manovre si viene a realizzare un circuito nel quale i due motori, con l'eccitazione invertita rispetto al senso di marcia in atto, sono posti in serie tra loro e chiusi sul reostato o in corto circuito e possono agire da generatori frenando il rotabile. Il passaggio in parallelo in frenatura è prescritto dalla SRTO si debba attuare solo in condizioni di estrema necessità, potendo dar luogo a gravi danni ai motori. Il circuito è chiaramente un ripiego per ovviare alla mancanza di predisposizione del freno elettrico sul controller e fu forse imposto da norme di legge. Tenere i due motori in serie in frenatura dà luogo ad una tensione elevata nel circuito chiuso sul reostato, che può anche raggiungere il doppio della tensione di alimentazione; se poi il conducente passa in parallelo durante la frenatura, può venire a trovarsi in una situazione di pericolo a causa dell'instabilità del circuito che si forma, equivalente a quello di due dinamo con eccitazione in serie, poste in parallelo tra loro; se una delle due macchine, come è normale, sviluppa una f.e.m. anche di poco maggiore dell'altra, ad esempio per una differenza di diametro delle ruote, si inverte il senso della corrente in quest'ultima che si eccita in senso inverso e si hanno due generatori in serie, in senso concomitante, chiusi su un circuito di resistenza ridottissima; la corrente nell'anello raggiunge rapidamente un valore elevato con sfiammate ai collettori e simili. Una modifica dei controller K10 (schema in alto, parte a destra) per semplificare il passaggio in frenatura reostatica eliminando anche il rischio di instabilità appare ben presto studiata dalla Thomson-Houston e applicata in America. Con i controller modificati, la manovra dell'interruttore A/F non è più necessaria, essendo il cilindro invertitore del controller dotato di cinque posizioni, anzichè di tre, secondo lo schema IND-FR, AV, 0, IND, AV-FR. Le posizioni AV, 0, IND sono le usuali di marcia avanti, apertura del circuito di trazione e blocco della manovella di avviamento, marcia indietro; le posizioni IND-FR e AV-FR devono essere utilizzate come segue: per frenare in marcia avanti l'invertitore deve essere posto in AV-FR, mentre per frenare in marcia indietro deve essere in IND-FR, in entrambi i casi passando poi a marcare qualche tacca in serie; le posizioni di parallelo sono bloccate. Le posizioni IND-FR e AV-FR sostituiscono l'interruttore A/F, che però resta presente e serve solo per isolare il circuito di trazione. Nel controller K10, per escludere dal servizio un motore, occorre aprire la cassa del controller onde accedere a due commutatori a coltello a due posizioni, ad azionamento verticale, l'uno bipolare per l'esclusione del motore 1 o A, l'altro unipolare per il motore 2 o B; i due commutatori si trovano nella parte bassa del controller, verso sinistra. La normale posizione di marcia con entrambi i motori in funzione corrisponde ai due commutatori in posizione bassa, mentre portandoli in alto uno alla volta si ottiene l'esclusione del corrispondente motore. Con uno dei motori escluso il controller è meccanicamente bloccato sulle sole posizioni di serie. Controller General Electric K36 E' il controller utilizzato dalle motrici STFER a due assi dei gruppi 7 e 40.
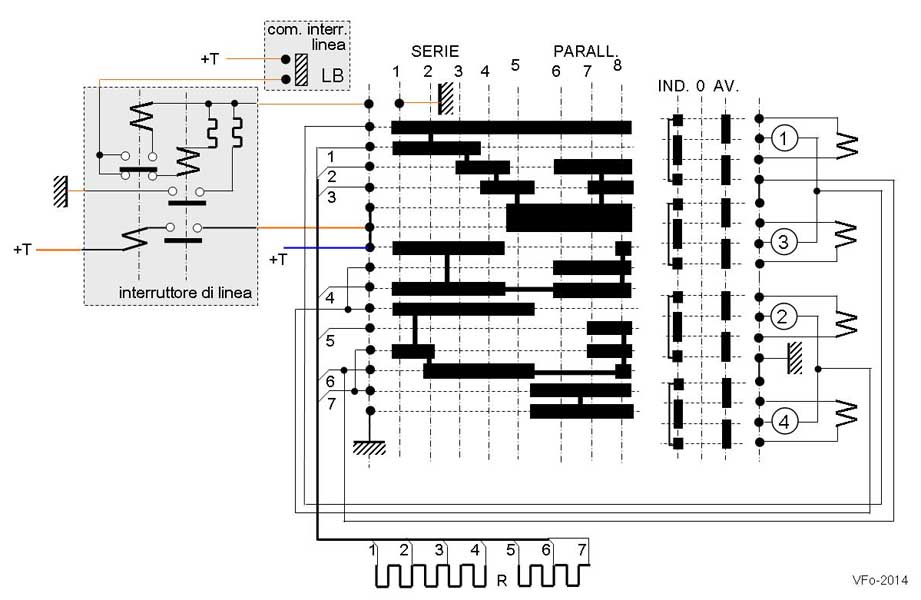
Controller General Electric K35 E' il controller utilizzato dalle motrici STFER a quattro assi dei gruppi 60, 70 e 80; i collegamenti in giallo si riferiscono ai controller con interruttore di linea (gruppo 80 e parte dei gruppi 60 e 70), quelli in bleu ai controller privi di questo dispositivo
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| . | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
TramRoma, ©1999-2023 - Curatori: Dario Giacomini, Mauro Di Pietrantonio |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ultimo aggiornamento: sabato 30 dicembre 2023 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||